This is a short note on how to setup a C programming environment for the FTDI chip in bit banging mode, since that's what I had difficulty doing.
There may be easier ways to go about this, but I wanted to use GCC to compile a small C program to control the 8 IOs. The purpose was to write a small command-line program that would reset my LPC1114 before and after programming.
You must have both the ftd2xx.h and ftd2xx.lib in the same directory as you attempt to build.
6. I then wrote two programs, one to send DTR and CTS high and low in order to reset the LPC1114 into
programming mode. ** Second, to send DTR and CTS high and low in order to send the LPC1114 into
run program mode.** The idea being, I could use the typical
Sparkfun FTDI programmer
to program my
LPC1114
.
I tried several IDEs to get the chip going. I wasn't happy with any of them.
LPCXpresso
was confusing and intimidating. Since I was trying to learn the chip
and
a new IDE. Add to this, NXP didn't have libraries for the chip, so I was trying to integrate the
LPC1114 CodeBase
libraries. They appeared to be incomplete and unkept. It didn't matter, I couldn't seem to integrate the libraries into LPCExpresso.
I then started using Mbed. A lot more luck there. But it was uncomfortable. I'm betting most reading are familiar with Mbed, therefore, I won't go into the usual rants about it being webbased and closed-source.
There are other problems with Mbed.
First, it is not a complete development solution. You need a flashing tool to upload code to the LPC1114 chip. The easiest tool to use is
FlashMagic
, which gives you a nice GUI to interact with the LPC1114. There is a slight problem, Mbed produces a
.bin
file and the LPC1114 needs a
.hex
file, subsequently, FlashMagic only allows uploading of .hex files. So, you have to use a third tool to convert the file from .bin to .hex before uploading. Sigh. It's a lot of trouble.
I craved more freedom, so I started looking for tools that'd allow me to code for the LPC1114 freely. A bare-metal solution. Just me, a compiler, and the
LPC1114 User Manual
(datasheet). Luckily, most of the work had been done for me. Frank Duignan, Ted Burke, and Bdk6 had pretty much all the answers pre-compiled for my little brain. Here's the steps I used to get a command-line programming environment setup.
/>
1.
Download and install
GNU Tools for ARM Embedded Processors (Win32 Release -- 2013, quarter 3).During the installation, make sure to check the box "Add path to environment variable."
/>
Check "Add environment variable."
If you missed this part, you can add a path to the environment variables by:
Right clicking on This PC / My Computer --> Properties --> Advanced system settings --> Environment Variables --> Select "Path" under "System Variables --> Edit. Go to the end of the list of paths, add a semicolon, then place the path of the GNU tools bin.
For me, this was "
C:\Program Files (x86)\GNU Tools ARM Embedded\4.7 2013q3\bin
"
/>
We are going to add several paths to the path systems variables. So, refer back to these steps as needed.
Really, we are only using Binutils for
objcopy
, which is at the end of the batch file. This translates the
.elf
produced by the ARM compiler into a
.hex
file. To unzip Binutils file I'd recommend using
7zip
. After installing them add the bin folder to your environment variable (see step 1). For me, I added "
C:\Users\Ladvien\Documents\LPC1114_Bare_Metal\Ming32\bin".
5. Create a build script in a batch file.
Create a build batch file recommend by Duignan and Burke. Open your workspace folder, create a new text file, enter the following:
arm-none-eabi-gcc-mcpu=0-mthumb-v-g-cinit.c-oinit.o
arm-none-eabi-gcc-mcpu=0-mthumb-v-g-cmain.c-omain.o
arm-none-eabi-ldinit.omain.o-v-L"C:\Program Files (x86)\GNU Tools ARM Embedded\4.7 2013q3\lib\gcc\arm-none-eabi\4.7.4\armv6-m"-lgcc-Tlinker_script.ld--cref-Mapmain.map-nostartfiles-omain.elf
objcopy-Oihexmain.elfmain.hex
Save the text file in your workspace as "build.bat"
Be sure to include the quotation marks, since this will convert the file from a text file to a batch file. This is the same build commands put together by Duignan, but I've added the "-v" option. This is the verbose mode and will spit out an errors during compiling.
7. Create a file called main.c in your workspace directory. Enter the following text:
/* Simple PWM demonstrator program * The program simply ramps the duty of pin 10 * from 0% to 100% and then resets back to 0% * */#include"lpc111x.h"voidConfigPins(){SYSAHBCLKCTRL|=BIT6+BIT16;// Turn on clock for GPIO and IOCON// Begin Port 0 setup.// Make Port 0 bit 5 behave as a generic output port (open drain)IOCON_PIO0_5|=BIT8;// Make Port 0 bit 10 behave as a generic I/O portIOCON_SWCLK_PIO0_10=1;// Make Port 0 bit 11 behave as a generic I/O portIOCON_R_PIO0_11=1;// End Port 0 setup.// Make pin 10 behave as a PWM output CT32B1_MAT0IOCON_R_PIO1_1|=BIT1+BIT0;}voidinitPWM(){// will use counter/timer CT32B1// Turn on CT32B1SYSAHBCLKCTRL|=BIT10;// Use match register 3 as period register because its output// is not pinned out. A value of 48000000 produces a frequency of 1Hz// so, to generate a 30kHz pwm signal, set MR3 = 48000000/30000 = 1600TMR32B1MR3=1600;TMR32B1MR0=1600;// Zero output to begin withTMR32B1MCR=BIT10;// Reset TC on match with MR3TMR32B1TC=0;// Zero the counter to begin withTMR32B1PWMC=BIT0;// Enable PWM on channel 0TMR32B1TCR=1;// Enable the timer}voidsetDuty(intDuty){// sets the duty to the percent specified.// Need to 'invert' the requested duty as the PWM mechanism// resets the output at the start of each PWM cycle and then// sets it on match.TMR32B1MR0=(100-Duty)<<4;}voiddelay(intdly){while(dly--);}intmain(){intDuty=50;ConfigPins();initPWM();while(1){setDuty(Duty++);if(Duty>100){for(Duty>1;Duty--;){setDuty(Duty);delay(100000);}}delay(100000);}}
Save the main.c file.
I've modified the above code from Duignan's to make it comparable to the
Fade
sketch in the Arduino examples.
8. Open the command prompt in your workspace directory. Run your build.bat file.
/>
After running the build.bat, it should build five files:
main.o, int.o, main.map, main.elf, main.hex.
If it doesn't build correctly, double check the path variables for both the compiler and binutils.
We still have the problem of getting the main.hex uploaded to the LPC1114. You can use FlashMagic, like above, but I'm trying to stick to the command line, that's where
lpc21isp
comes in.
You'll have to adjust the COM port to the port you are using. Here is a little bit of a
guide using lpc21isp
. Also, you'll either need to put the lpc21isp file in one of the folders added in the path variable. Or, make sure the LPC1114_upload.bat and lpc21isp files are in the same directory as your main.hex.
11. Wire up your LPC1114.
/>
One last bit I should point out, when "DP24" is connected to ground and then voltage is supplied to the LPC1114, it'll enter the hardware bootloader. But, if DP24 is open or (preferably) pulled-up with a resistor when voltage is supplied to the LPC1114 then it'll run whatever code has been uploaded to the flash memory.
"DP24" is actually pin 1 on port 0.
/>
12.
Connect your LPC1114's RX/TX to an serial connector, put it into the bootloader mode by connecting DP24 to ground, then apply power to the LPC1114. Lastly, run the LPC1114_upload.bat file. This should result in the LED connected to "SWDIO" pin to fade on and off.
And that's what I've got. I'm going to start working on coding now, so I'll trade to add to this write-up as I've more to share. I plan to try these steps on my lab machine around June 1st to make sure they work. But if anyone uses them before them, please let me know if there are corrections to be made.
As always, I value feedback and critique.
This will automatically put the LPC1114 into program mode, upload your code, then reset to run your newly uploaded program.
Just like Arduino!
(Bdk6, you didn't see that statement, right? :)
Of course, lpc21isp is an agglomeration and had an error(?) that wouldn't reset the chip after downloading the new code. I simply commented an if-statement and it is now "working." I'm sure I've lost some robustness, but hell, it does what I want with no apparent side-effects. If you would like to know more about how I "broke" lpc21isp check my Github
readme
on the issue.
When I made my mind up to build a 3D Printer I knew I was in for a ride. I knew I was going to spend an insane amount of time calibrating the damned thing. Well, my overestimation was nowhere near the truth. I've spent literally days calibrating this damned machine. Mind you, a lot of it was because I refused to "RTFM." But the other part was because there doesn't to seem to be a manual on calibrating the Kossel Mini. Therefore, I'm going to attempt to present what I've learned for delta printer posterity.
Note, this guide will focus on the "holes" other sources of documentation have, more specifically, holes in:
Let's start with getting the firmware and software.
I mentioned in the physical build of my printer, I bought most of my stuff as a kit from builda3dprinter.eu. I've been pleased with the kit. Most of my frustration with the physical build was me not understanding how the pieces work together (for instance, the auto-probe). Anyway, Ardon Camp from B3DP has provided some starting firmware for his kits, which is listed on his "
Initial set-up
" page
We should have firmware (Marlin) and a host (Repetier or Pronterface). What now?
Well, hind-sight is 20/20, so here are my suggestions.
1.
Get familiar with G-Code
Most 3D printer firmware operates on a standard set of instructions called G-Code, which are sent to the printer via serial connection. There is a code for everything, turning the heater on, going to an end-stop, writting settings to the EEPROM. My recommendation, before you start moving any part of your printer, read through
all
the G-Codes. This will give you an idea how your software talks to the printer.
2.
Check, re-check End-Stops connection before testing motors
Now that we've read up on G-Code, we know the code to check and see if the End-stops are triggered is M119. Check this a few times before you attempt moving anything electronically. If everything is connected correctly it should look like this,
No Buttons Pressed:
Y_MAX: Open
X_MAX: Open
Z_Min: Triggered
Z_Max: Open
All Buttons Pressed:
Y_MAX: Triggered
X_MAX: Triggered
Z_Min: Open
Z_Max: Triggered
It is important to have these trigger correctly, otherwise, your hot-end will go crashing into something. For example, if one the end-stops isn't triggering then the connected carriage will continue trying to pull past the end-stop, which will result in the your belt-link coming apart.
/>
Expect for your links to come apart a few times as you make adjustments.
Being forthright and humble, I made so many mistakes calibrating my Kossel that my links began to stretch out and were unable to hold the belt properly.
I was able to bend them back into place by clamping them with pliers while heating the bottom side with a lighter.
/>
3.
Fans
The Kossel Mini has a small 40x40mm fan that blows directly on the hot-end,
all the time
.
/>
This is required because the hot-end holder is actually a printed part, meaning it is plastic, therefore, if the hot-end exterior isn't constantly cooled, it will melt the holder and come crashing down on your print plate in a neat heap of defeat.
The fan should operate on 12V. You have several options.You can tie the fan into the PSU itself, which would cause the fan to be on everytime the printer is on. Or, you can tie the fan into the Ramps board.
I chose the Ramps. Don't ask me, probably because I intuitively find a way to do something through hardest means possible.
Anyway, here is how I have all my fans, (1) on the hotend, (2) cooling my extruder stepper, (3) an 80mm cooling the print bed.
/>
I then connected all these fans to D9.
I'd like to take a sidetrail a moment. Power terminals D8, D9, D10 are simply high-power N-Channel MOSFETs controlled by PWM from the Arduino Mega's D8, D9, and D10 pins. If you'd like the exact specs, here's the
datasheet
.
Ok. Now we have a few things to set in firmware to get the fans to act correctly. First, make sure you are using the option under Configuration.h
#define MOTHERBOARD 33
This sets the three power channels on the Ramps to function as the following:
D10 = Extruder Heater (hot-end)
D9 = Fans
D8 = Heated Bed
Now that is setup, then everything should work hunky-dorky, right? Well, kinda.
I was having two problems. First, the fan didn't come on automatically, I had to send the G-Code command "M106 SXXX" to get it to turn on, the XXX being a number between 0-255 to set the PWM of the fan (also, the command M107 used to be to turn it off, but now we just send "M106 S0").
Second problem, my fan didn't like to kick on with PWM. Sometimes it did, sometimes it didn't. Often, I'd start a print only to find my hot-end melting the effector plastic. Sigh.
Now, some people who know Marlin better than me will probably point out the option under the
Configuration_adv.h,
#define FAN_KICKSTART_TIME 100
The number is the number of milliseconds to drive the fan at full speed before switching to a temperature based PWM. Now, I tried tweaking this number a bit, but I found my fan would still lock up during times it would slow. Eh. That is one reason I write this, if others have solutions, please add them in comments. :)
/>
What I ended up doing was finding the option to have my D9 channel to run at full power all the time.
Under the
Configuration_adv.h
file I found the options to define the extruder fan's behavior. First, I setup the D9 channel as our fan channel by setting
#define EXTRUDER_0_AUTO_FAN_PIN 9
Then, I changed the kick-on temperature to -1, meaning the hot-end would need to be below freezing for the fan to turn off. So, a hackish always on switch.
4. Physical Print Calibration
"But I bought a Kossel 'cause it's got an
Auto-_Probe!" Ya, I'm humble enough to state those words did run through my mind. Yet, I've learned, the auto-probe is like many things in electronics, nice to have, but does not replace the ability or the understanding behind it. I'll go as far as stating, the auto-probe _is meant to keep your physical calibration on track, even after heavy use,
rather than compensate for poor calibration_._
Alright, to calibration.
I couldn't find any Kossel Mini specific guides on how to calibrate the machine, but I found a lot of scattered information in the
This is going to tell your printer you have a build volume larger than you do, but we do this so the firmware wont stop us as we try to move the hot-end as close to the bed as possible. Now, perform the paper-test.
For the sake of brevity, I'm going to define the paper-test once, then simply refer to it as the paper-test.
The idea is eventually you want about a paper's width space between the hot-end and the printer bed, when the printer is told to go to
Z0.
The paper-test consists of putting a piece of paper on the print bed, then lower your hot-end manually, 10mm steps at first, but as you get closer, 0.1mm steps. At the point the hot-end is putting just enough pressure to create a little drag on the paper, you stop going down. This is the paper-test.
Ok. You lower the hot-end carefully until it passes the paper-test. Then, send the G-Code for getting the Z position.
M114
The printer will respond with the current value for the X, Y, Z, and E (extruder). You only want the Z-value you right now. Take the Z-value and subtract it from the 270, this will be your new MANUAL_Z_HOME_POS. That is,
MANUAL_Z_HOME_POS = 270 - Z_Value obtained by paper-test.
Now, there is a way to set the center of your build plate in your Marlin firmware, but it is better only to tweak it there
after
you have the physical part set pretty damn close to center. This is what I did.
/>
I used Eagle Cad to make a 170mm diameter circle, with exact center marked (provided below). Then, I printed it to scale on a piece of paper. I cut this paper out and centered it on my build plate, then taped it down.
Next, I lowered my hotend until it was near to center.
Using the controls, I attempted to center the hot-end above the circle the best I could. It helps to change your angle several times before each move. Once it is center we are going to take a measurement, but something important to know before we do. The stepper motors will timeout from their held position, going into an idle position. Be careful not to let them timeout on the next two steps, since you'll lose a little time by needing to start over. To keep them engaged, simply micro step one direction, then right back.
/>
Ok, measure from the top of one of the carriages to the bottom of the plastic on an end-stop, basically, where the end-stop button would be if it was pressed. Also, the end-stop doesn't matter since our goal is to get them all the same.
Alright, at this part you need a saw that will give you a square cut. I used a speed-square and a circular saw. Also, smaller board, like a piece of trim board. Cut a piece of wood the same length as you measured.
/>
Take the piece of wood to the printer. Lower the hot-end to Z0. Then, re-center using the target-template. Now, take the cut wood and put it between each end-stop and the top of its respective carriage, being careful not to let the motors go idle. If the end-stop is too high, lower it until it is flush against the wood. If the wood will not fit, raise the end-stop until it does, making sure it is flush. In this manner you are assuring each arm is equidistant from the print bed, while maintaining the hot-end centeredness.
After this is complete, you must repeat Step 1. This sets centeredness
and
Z-Offset.
Now, test this by sending the G-Code:
G X0 Y0 Z15
If all worked, the hot-end will magically find its way to the center of the print bed, while staying 15mm above the surface. If that goes well, microstep the hot-end back down to the surface to assure we maintained the correct Z-Offset (aka, print volume).
Step #3 -- Flat Print Surface
Even after all this, we still aren't done. There is another variable to calibrate on the Kossel, the flatness of the plate.
We have already calibrated the Kossel's print volume height. This means if we send the command
G X0 Y0 Z0
then the hotend-should come to rest at the center of the print bed, about .1mm above the surface. But, delta printers have an additional variable of
flatness.
Consider the two following images:
/>
/>
In this image the blue line is the print surface according to the Marlin firmware.
Do you see how this could create a problem? The center Z offset may be correct, but as the hot-end moves towards the edges, it gradually rises until the hot-end is resting 2-10mm away from the print surface.
Let's look at the other, possibly more damaging, scenario.
If the print bed, according to firmware, is convex, then the hot-end might be correct when at center, but as you get to the edges, the machine tries burying your hot-end into the glass plate.
This is why Johann's auto-probe was such a nifty addition to the Kossel build. But let's not get ahead of ourselves, physical calibration first.
Well, that's sort of a lie. To correct for flatness we are going to adjust the firmware. The flatness of a Kossel is reliant on the variable
DELTA_RADIUS
and it is the sum of several variables. So, to adjust DELTA_RADIUS we focus in on either increasing or decreasing one of the variables. I picked
DELTA_SMOOTH_ROD_OFFSET
at random.
Ok, the adjustment is pretty straight forward, but requres tinkering to get it right. But before we make an adjustment we need to know what direction to go. We can determine this by visually comparing difference between the distance between the hotend and the print surface when the hotend is at the center, and the distance between the hotend and the print surface when near one of the towers. Let's go back to pictures.
/>
This image is to give you an idea what points we want to compare for flatness. For instance, if Kossel passes the paper-test at point A, then it should at points B, C, and D.
But if the
Kossel passes the paper-test at point A, and is too high at B, C, and D then you have a concave print surface.
Likewise, if the
Kossel passes the paper-test at point A, and is too low at B, C, and D then you have a convex print surface.
B Height > A Height = Concave
B Height < A Height = Convex
One more bit, you maybe asking how to find the spots B, C, and D. Well, I used the following calculations
Xb = (Build Radius) * COS * (Angle of B tower)
Yb = (Build Radius) * SIN * (Angle of B Tower)
Also, know your towers should be at angles:
90, 210, 330
If you have the same build radius as me, 170, then your points should be.
Y70, X0
Y-35, X-60
Y-35, X60.62
But remember, we are really looking that all four points pass the paper-test.
Let's move on to how to make the adjustment. I will not go into the math explaining how adjusting DELTA_RADIUS affects flatness, mainly because I don't understand it. But secondly, because we don't need to understand it to adjust it. Just know the following,
Increasing DELTA_SMOOTH_ROD_OFFSET lowers the hotend.
Decreasing DELTA_SMOOTH_ROD_OFFSET raises the hotend.
Really, it is changing the firmware's idea of flatness.
Now, make the adjust from the visual information you collected by comparing point A to point B, C, and D. Then, comparing them again, adjust again. Compare, adjust.
Ad infinitium.
Please, don't think your done. Making these last adjustments means you really need to go back and start from Step #1 and work through them a second time, since any adjustment throws the previous adjustments off alittle.
So, it is true, adjustment is an infinite process of error reduction and perfection will never be achieved. Be happy with pretty damn close :)
6. Auto-Probe
Physical calibration is done, now let's examine what makes us Kossel users, our respective auto-probes.
The auto-probe is meant to keep Kossel Mini printing flat. That is, it is meant to adjust for
slight
inconsistencies in the print bed or
minor
mechanical disproportions.
Alright, as the rest of this article, I don't plan to re-hash stuff that has already been covered. Such as setting up the auto-probe. Just refer back to
Blokmer
, or
B3DP
. But here are a few things I feel they missed:
#1 -- G28 CANCELS G29 DATA
This I feel is the most important omission from the calibration guides
. G28 is the G-Code to home the tower end-stops, just know whenever you do this, it will cancel the readings you took from the auto-probe.
And beware, Slic3r adds a G28 command before every print.
/>
To remove this from Slic3r,
Go to "Printer Settings"
Under "Start G-Code" delete "G28; home all axes" line.
Under "End G-Code" delete "G28 X0; home X-axis" and replace it with, "G1 X0 Y0 Z220 F5000"
Step number three is just a suggestion, but you do want your hotend to back away from the print when done, so you don't catch anything on fire. You just don't want to reset your auto-probe data.
And yes, I spent 20 hours or so adjusting my auto-level and scratching my head everytime my print didn't adjust respectively. (If it wasn't for
Hoff70
, I'd still be scratching my head).
I'm
not
smart, just obessive.
#2 Finding the X, Y, Z Offset of the Z-probe from Extruder.
The Z-probe doesn't sit directly over the tip of the hot-end, so we have to adjust for this offset. To find this number, I did the following.
Put the auto-probe in its active position (as if to take readings).
Using Repetier or Pronterface, move the effector from the hotend being centered, until the tip of the Z-probe is centered.
Then lower the effector until the Z-probe passes the paper-test.
After, send G-Code:
M114
. The output is our auto-probe offset.
Take your readings and put them into the three defines in Marlin
#define X_PROBE_OFFSET_FROM_EXTRUDER
#define Y_PROBE_OFFSET_FROM_EXTRUDER
#define Z_PROBE_OFFSET_FROM_EXTRUDER
As for directionality,
I found if my X or Y numbers were negative, I was telling the firmware my auto-probe was offset into the -X or -Y regions
. Of course, the Z-probe offset is always negative, or you'd be in trouble.
#3 -- Visualizing Auto-Probe readings
This is another important piece I feel guides leave out. What does the auto-probe data mean?
Don't ask me, that'd take math. I'd much rather look at pictures. So, how do we turn the data into a picture? Well, there are several methods, but really, any program that will turn a set of points into a plane.
One of the guys from the Delta Google Group wrote this Python script for MATLAB.
Buuut
, I don't have MATLAB and I'm not currently tied to a university, so I had to think of another way. Well, my profession is mental health and I use Excel for a lot of statistical analysis (hey, SPSS costs money, too). Anyway, here are the steps I took to visualize the data in Excel.
1. Run Auto-Probe.
Once auto-probe is done, it'll send back a set of points. Copy them.
/>
2.
Paste the points into Excel.
It'll complain about formatting, press OK.
/>
3. If you click on the formating options and select "Text Import Wizard."
You can then select a "Space Delimited" pasting option. Basically, this will cause Excel to translate th
/>
4. Once you have your data in Excel correctly, let's make a graph. Select your data set then go to the graph type "Surface."
/>
5. There's the graph.
/>
6. There are several things you can do with this data, but only if you have a point of orientation. That is, what area on the graph represent the area on the print surface. To find the auto-probe data orientation, I built a lump on my print surface near one of the towers, like this:
/>
Be careful, if your Z-probe doesn't retract far enough, it'll knock your lump into the belt.
You can adjust how far your Z-probe retracts between probing in the Marlin firmware. Under
Configuration.h
adjust,
#define Z_RAISE_BETWEEN_PROBING
If all goes well, when you run your auto-probe data you'll get a nice lump on the graphed surface. This will allow you to make intelligent decisions regarding adjustment.
One last bit I'd like to point out.
None of this is going to help if your auto-probe is not mechanically reliable
. But how do you tell if it is? Well, until someone corrects me, I did the following.
Ran the auto-probe about twenty times.
After each, I took the mean of the data.
Then, after I had about twenty means, I ran the standard deviation on those means.
This number is a fair indicator of how reliable your auto-probe is mechanically. That is, are the readings it is giving you reliable. The smaller the number, the more reliable.
Of course, I'm not great with math and I'm pure hack, so someone with more understanding of the logic let me know if that is incorrect.
And with that I'll close by saying:
I'm a hack. I wrote this article not to point out everything I know, but rather, what I've learned. If anyone finds incorrect information, please comment; I'll make changes quickly. The last thing I'd like to do is steer someone wrong.
I thought I should give my Kossel a "Robot" page, since Silas asked what the Kossel was, and I told him, "A 3D Printer," to which my precocious son replied, "No, it's a robot."
A lot of the information here is a copy from my build blog, but I've re-thought it's presentation slightly, since there preexist two build guides for the Kossel.
Both are put together by organizations selling Kossel kits. Blokmer's guide is much more detailed and slow paced. Of course, I purchased my kit from builda3dprinter (here on referred to as B3DP) and tried to use their guide as much is possible, that said, the B3DP guide has
a lot
missing information. I wont bitch too much, since I've enjoyed their kit, but it does bring me to how I'll approach the information here.
I'm going to write this
guide as a supplement to existing build guides.
For example, the Kossel has an auto-level probe that is somewhat problematic to assemble. Both guides did a poor job of explaining several key parts of its assembly. Therefore, I'll focus primarily on missing information.
I need to say I've mixed feelings towards B3DP. Being a mental-health worker, when someone has mixed feelings we create a T-Chart of pros and cons. Here's mine on B3DP kit.
Cons:
Shorted ~20 M3 Nuts.
Six weeks for processing and delivery
No clear documentation on the effector provided
Missing Allen key, springs, and safety pin (for auto-probe). This is not included in their list of
what's not included
.
Communicate well (they responded quickly to all my questions).
Their kits
do
work well together.
In fairness, I'm not done with the build, but writing this out,
I'd say I would buy B3DP kits again
.
The bit it's difficult to put a price on is part precision and synergize. Since the parts are meant to work together, calibration is much simplier (still not easy). For instance, instead of having to measure out the length of rods, carriage offset, etc. B3DP provided a Marlin (firmware for delta) with these measurements already input. In sum,
half of the calibration is already done by B3DP.
/>
Purchase "Doh"s!
1. Effector mismatch:
B3DP provided me with a
MK V end effector
and I bought
MK IV J-Head
extruder that was advertised as an MK V. Point to you eBay. So far, this hasn't caused any problems, I simply pulled the brass end off my extruder and pushed it into place. Not sure of the open area between the effector plastic and the PTFE tubing will cause me problems down the road, like filament bunching.
/>
2. Must have a
Geared
Stepper motor for extruder:
I purchased my stepper motors in a lot of five. I thought, "I'll use 3 for the X, Y, Z axes and one 1 for the extruder." Well, this is where I should have done more research. The original design for the Kossel requires a NEMA 17
Geared
Stepper Motor. So, I broke down and ordered a
geared
stepper-motor for the extruder. I was a little under budget and felt it was a better choice rather than struggling trying to get the current motor I had to work with what B3DP sent.
But to be clear
the extruder from B3DP is built for a stepper-motor with a 8mm shaft.
Actually, the parts are from the original design which called for a geared-stepper motor and a spur-gear with 22 teeth, with a 8mm diameter shaft. The "common" NEMA17 has a 5mm diameter shaft. I've seen a few extruder designs that use a regular stepper and a 5mm diamter spur-gear,
but that is not what comes with the B3DP kit.
Assembly
Like I stated, I'm no going into a lot of detail about the assembly, since there exist two guides. But I'll include time-lapse of most of the build (what was easy to film) and notes on stuff not in the exist build-guides.
The Blokemer guide states I should tap and drill the Traxxas ends and the carbon rods. I bought a metric tap and die set from Harbor Freight, but when I examined the pieces I received from B3DP I noticed the headless bolts were too small to catch the inside of the carbon rods. Also, I wasn't sure how to use my tap and die; this devolved into the realization I had the wrong thread sizes. Makes sense, I was using a US tool and parts from everywhere else but the US.
Well, I lucked out.
According to the
B3DP manual
you don't need to tap anything.
Just screw the headless bolts into the Traxxas ends, then use slow-setting Epoxy to glue the ends into the carbon rods. Screwing the headless bolts in the Traxxas ends went great. Um, gluing was another matter.
Not much to say about setting up the jigs for the carbon rods and Traxxas ends. Just follow the instructions on pages 3-6 of the
Blomker guide
. I used a square and a speed-square, the square to align the rails flush, then the speed-square to align the machine screws at one end. I've read that the arms can deviate from the 180mm outlined by the guide, but
they should all be the same length.
My goal was to identify rods longer than the others and file them down a little.
Post-build note:
I found to "spare" objects in my plastic parts that came from B3DP--I realized they are jig bits
. Doh.
I bought some cheap slow setting epoxy from Harbor Freight. I mixed it with a chop-stick (a favorite tool) and began to apply it to the Traxxas ends. Then,
I f'ed up.
I dropped one of the Traxxas ends into the epoxy. I tried cleaning it in alcohol and acetone. But there was still some residue that prevented the ball-joint from moving as freely as I wanted. Sigh. I went ahead and ordered more Traxxas heads, so, if anyone needs an extra because they dropped it in epoxy, just let me know. I'll have eleven.
One more note,
be sure to wipe excess epoxy from the Traxxas end and rod joint.
I was worried about an improper seal between the two and left the globulated extra. It leaked into the crevices of the
1515 Beam
. Of course, I thought, "I'll just make sure to turn the yucky part inside when I put the pieces together so it's not noticeable." Well, the nuts bolting it to the plastic pieces are also on the inside. In short, it caused a lot of problems. I'd wipe them off before setting them in place on the jigs if I could do it over.
I didn't like the name "Bottom Assembly" so, I renamed this step: Bottom Triforce assembly. For the most part, smooth sailing. Just make sure you
barely
screw the nuts on. If they are too tight you can't get the plastic lips to close around them. Also,
they have a top and bottom.
Adding the shafts to the bottom Triforce was a little tricky. First, it should be noted, there is an "up" and a "down" to the Triforce pieces:
/>
/>
/>
]
The little circular tabs on the bottom Triforce assembly are for printing purposes and may be removed with a sharp knife and steady hand. In the absence of a steady hand, a lot of blood and an emergency-room visit will suffice.
Also,
don't screw any bolts down too tight until you press all pieces together.
I had reviewed the section in the
Blokmer
guide, pages 28-32, but I realized the need for give from all sides was greater than expected. You'll notice towards the end of my video I was struggling not to look like a complete idiot trying to push all the pieces together.
/>
Of course, I didn't realize this until I already had bolted the bottom Triforce down and started trying to shove the first shaft in place. I quickly pulled the bottom apart, flipped the odd piece I had so
all
my plastic pieces had the two-prong guide at the "top."
Now, I've seen half-dozen different ways to press the 1515 into printed plastic. I tried my heat gun, but was really wary I'd deform a piece and I would have to wait 6 weeks to get another from B3DP. I ended up using the following tools:
To press the rods in, I started the rod into the first nut. Then, when it started to get tight, I put a little bike oil (the green bottle) around the edges, flipped over the assembly, and put it in my lap. I pressed the end of the rod I had started against the tile floor and beat on the receiving end (assembly) with a balled fist.
/>
Well, this worked great. A little too great. The rod slipped past being flush. This is where the screwdriver and hammer came in. I simply left the assembly in my lap, but raised the rod off the floor. Then with the tip of the screwdriver against the end of the 1515 rod, I tapped against the screwdriver with the hammer. This allowed me to align the 1515 rod flush with the bottom plastic of the Triforce assembly.
Carriages assembly went pretty well. I had to tap the holes for most of the bolts on the carriages, since there was printer-webs still in the holes. But after the holes were clear it was pretty straight forward. I followed the guide from
B3DP
.
A few notes:
If you haven't sorted your bolts, might be a good idea to do it now. If all your bolts are lumped together
digital-calipers
are a godsend. You just measure from directly under the head, to the end of the shaft.
/>
There are three nuts that will need to be pressed into the plastic of the carriage assembly. I used a heat gut to soften the plastic of the intended holes, then pressed the nut slightly in place by placing the tip of a flat-head screwdriver over the nut and tapping it with a hammer. This method worked well.
One exception,
there are three nuts, but two of the bolts are 25mm and one is 16mm.
The 16mm bolt is not long enough to catch the threads of the nut unless you tap it deep into its hole.
I hope this picture makes it clear:
Only bits of advice on the motors are:
Make sure you tap the holes in the plastic to prevent any plastic shards from misaligning your bolt as you try to screw it into the motor hole.
Also,
don't tighten any bolts down until all your bolts are started
correctly
. I found they often were misthreading, which I attributed to such a harsh angle.
/>
Oh, one more bit,
purchase a long 2mm Balled Allen Key
for this process. As you may notice at the beginning of my video I tried with a short, balless Allen key to no avail.
The carriage assembly is pretty straight forward, just make sure you follow the instructions and don't get in a hurry. But the effector I had a little difficulty putting together. Mainly, the
round part of the J-head wouldn't fit into the hole.
I've tried to avoid using a heatgun as much as possible, but here I used it to warm the plastic enough and pressed the J-head into place.
Here I become a little peeved at B3DP. First, there are three parts
they do not include
in "
The Rest
" kit, but also don't mention in the "
What's not included
" section. They are
the spring, safety pin, and Allen-key for the auto-level
.
The auto-level bit is a little tricky to put together. You will need to source three parts: The safety pin, Allen-key, and springs. I ordered an
Allen-key
off eBay. The safety pin I "borrowed" from my wife's things. And the springs I pulled from some old pins. After much fiddling I was able to piece something together.
Now, I need to state, in my original blog I was a little unfair to B3DP. I bitched about them sending a button-switch for the auto-probe. The problem was they provided a button switch instead of an button
and
arm switch.
/>
Arm and Button
/>
Button Switch
/>
This should not have bothered me too much, since the three end-stops worked. But when it came to the auto-level, the Allen-key crook was supposed to catch the metal arm of the above shown switches, guiding it down to the button. Well, I found when the Allen-key came to sit on the button, instead of pressing it down it would slide either to the left or right. And it didn't seem to matter how much tweaking I did, I couldn't get it to sit right. In the end, I bought the "appropriate" switch at Radio Shack for $3.
Here is what my auto-level looked like after tweaking. When I tested it unmounted it worked.
/>
But,
when I mounted the auto-probe and started using it, I found the arm would catch underneath the safety-pin bolt. Hmm.
Therefore, I feel I owe B3DP
half
an apology.
I ended up using the switch I was sent, effectively, and I apologize for bitching about the wrong switch.
But
, to get the switch I was sent to work properly, I had to layer heatshrink, over, and over. This builds the arm up to the point it can't help but catch the button. And the heatshrink has some natural resistance to it. This necessary modification probably needs to make it into the B3DP guide.
Regarding the power-supply.
/>
I tried buying a cheap computer-power cord from eBay. But after I sliced the end off and found less copper than in telephone wire. I sacrificed one of my old computer power cords. The powercord wasn't as long as I'd like, but it had enough copper to pull the possible 30A the PSU could source.
To wire the PSU,
Green <---> Ground
White <---> N(eutral)
Black <---> L(ive)
Also, if you are using that fasttech.com PSU, I noticed it came to me with the 240v as default. If you're in the states make sure you flip the switch on the side.
After wiring my PSU to the Ramps I turned it on and looked for blue-smoke. Nothing. Waahoo!
/>
But I had another problem. The Mega underneath wasn't getting power. Well, I scratched my head for a bit and then actually read the
Ramps
manual. Apparently the diode that had been taped to the underbelly of my Ramps is what enabled it to be powered from a 12V PSU. I soldered it in place.
After soldering the diode everything
appeared
to be working. I continued to wire everything else up like proper.
/>
12V to Arduino Mega Diode placement
/>
Here, I switched gears and put the top Triforce together.
One note I'll make. Again, the top Triforce has a "bottom" and a "top." It has to do with the tensioner bolt, it must angle from the top-outside to the bottom-inside. Like this,
After, I got a hankering to actually put the top on and the belts in place. It took a little courage, since B3DP sent my timing belts in one role. I had to make cuts and was worried they had given me
just
enough belt and if I made a cut that was a little off would have to wait on another belt. But it was in vain, I had enough.
/>
To cut the belts I just strung them up as shown and left about four rubber-teeth past the end of the linker groove. The little extra room can be adjusted when the top Triforce is put on. There are three tension bolts for this purpose.
/>
This is what the belt should look like in place,
except
the should go below the carriage or it will knock into the end-stops before carriage.
(Sidenote, from here on I'm using a lot of pictures, since the Kossel is a little difficult to video given its physical size)
I then tightened the top Triforce and quickly hooked up the Ramps. I uploaded the Marlin firmware and was able to get the motors to respond to one direction. The problem came when I tried to hook the cooling fan to the Ramps. Two of the three FETs were putting out 0Vs. Waaa-waaah.
I found out later (Brassfly and Bdk6 actually figured it out) that it was not bad FETs. It was a trace-short somewhere on the first 12V power rail. Oh well. I ordered another Ramps board for $14 and took a break from the build for 18 days while it found its way to me.
The evening I received the new Ramps board I wired everything up. Sure enough, I powered the thing on and all the blue-fairies stayined in their Silicon homes. I then ran the Blink sketch to check the power FETs on pins 8, 9, 10. They all powered on like expected, spitting out 12Vs.
Next, I uploaded Blokmer's Marlin sketch.
Big mistake.
Blokmer and B3DP both provide a Marlin sketch with "typical" measurements already plugged into the Configuration.cpp. I didn't know this. I had essentially put diesel into a gasoline engine.
B3DP's Setup Page
. It links to Marlin Firmware specific to B3DP Kossel, Pronterface, and KISSlice.
Of course, I pulled a lot of my hair out using Blokmer's firmware with a B3DP build. In the end, I downloaded B3DP's Marlin and Blokmer's zip file. That is, I used the appropriate Marlin with Pronterface and Slicer.
Before I move on though, I'd like to go over wiring.
Here is the B3DP wiring chart:
/>
Of course, my stepper-motors had different color wires, but I guessed and got it right. Really, I figure they would either move up or down, then I could switch them if needed. A word of caution,
make sure you wire each stepper to its corresponding end-stop. If not, when you home the end-stops for the first time one or two of the motors will stop, but the other two or one will continue because their end stop hasn't been triggered, resulting in your belt(s) coming loose. E.g., motor X will hit end-stop Z, but not turn off because the X end-stop hasn't been switched. And the X end-stop wont switch off because motor Z has stopped because its end-stop has be triggered.
Clear as mud?
Just make sure each end-stop is wired to the appropriate motor.
Regarding the thermistor, it is non-polarized. Just plug it in.
Ok. I'm going to consider the "Mechanical" section of this build complete. Now, I'll begin working on the hard stuff:
Calibration
.
I started looking through Newbie Hack's tutorials on AVR trying to work up the energy to tackle
First LCD Program
. Many don't know this, but I
despise
workings with LCDs. I think it is two parts, one, I live in a world with high-resolution screens embedded in everything from
coffee-machines
to
toilets
. Trying to settle with an old school LCD doesn't cut it for me. Furthermore, wiring a non-serial interface LCD is a ever loving pain.
But looking at the rest of the Newbie Hack tutorials I knew I would need some way to display information from the ATtiny1634. I thought about it and compromised: I'd focus on UART next. That way I could display information on my desktop screen.
I began reading about UART on AVR; here are some of the good ones I found,
After reading the articles I opened up the ATtiny1634 datasheet and decided I would start by trying to output "ALABTU" to a serial-port into
Real Term
.
It took me maybe an hour or two to get something working; here is what I learned along the way.
1. AVR UART is Easy.
The following code sets the baud rate on the ATtiny 1634 using the UBBR chart from the datasheet, then, transmits the letter "A."
UART Code v01
//// UART Example on the ATtiny1634 using UART0.// C. Thomas Brittain// letsmakerobots.com#define F_CPU 8000000 // AVR clock frequency in Hz, used by util/delay.h#include<avr/io.h>#include<util/delay.h>// define some macros#define UBBR 51 // 9600, .02%// function to initialize UARTvoiduart_init(void){/* Set baud rate */UBRR0H=(unsignedchar)(UBBR>>8);UBRR0L=(unsignedchar)UBBR;/* Enable receiver and transmitter */UCSR0B=(1<<RXEN0)|(1<<TXEN0);/* Set frame format: 8data, 1stop bit */UCSR0C=(1<<USBS0)|(1<<UCSZ00)|(1<<UCSZ01);// 8bit data format}voidUSART_Transmit(unsignedchardata){/* Wait for empty transmit buffer */while(!(UCSR0A&(1<<UDRE0)));/* Put data into buffer, sends the data */UDR0=data;}intmain(){uart_init();while(1){USART_Transmit(0x41);}}
Line 10:
This creates a macro for the UART Baud Rate Register (UBBR). This number can be calculated using the formula on page 148 of the
datasheet
. It should be: UBBR = ((CPU_SPEED)/16
DESIRED_BAUD)-1. For me, I wanted to set my rate to 9600, therefore: UBBR = (8,000,000/16
9600)-1; Or: UBBR = (8,000,000/153,600)-1 =
51.083.
It can have a slight margin of error, and since we can't use a float, I rounded to 51.
/>
We then setup of function to initialize the UART connection.
Lines 16-17
load our calculated baud rate into a register that will actually set the speed we decided upon. This is done by using four bits from the UBBR0L and UBBR0H registers. If the >> is unfamiliar to you, it is the
right-shift operator
and works much like the left-shift, but yanno, in the other direction.
Still in initialization,
line 19
enables both the RX0 and the TX0 pins (PA7 and PB0 respectively). I'm not using the TX0 pin yet, but I figured I might as well enable it since I'll use it later.
/>
Line 21
sets the bits to tell the Tiny1634 what sort of communication we want. We want 8 bit, non-parity, 1 stop bit. Enabling USBS0, UCSZ00 and UCSZ01 give us these values.
/>
.
Line 24
is the beginning of the function that'll transmit our data.
Line 27
checks to see if the ATtiny1634 is finished transmitting before giving it more to transmit. The UDRE0 is a bit on the UCSR0A register that is only clear when the transmit buffer is clear. So, the
while ( !(UCSR0A & (1<<UDRE0));
checks the bit, if it is not clear, it checks it again, and again, until it is. This is a fancy pause, which is dependent on the transmit buffer being clear.
Line 30
is where the magic happens. The UDR0 is the transmit register, whatever is placed in the register gets shot out the TX line. Here, we are passing the data that was given to the USART_Transmit function when it is called.
Line 39
is passing the hex value for the character "A" to the transmit function.
This was a bit easier than expected.
Here was the output from Code v01.
/>
After a little more tweaking and watching Newbie Hack's video on
sending strings to an LCD
, I adapted NH's code to be used by my UART_Transmit() function I ended with a full string of "ALABTU!" on the serial monitor.
I did this by creating a function called
Serial_Print,
which is passed a character array (string).
StringOfCharacters
is a
pointer
and will be passing each character to the UART transmission. Pointers are simply variables that point to the contents of other variables. They are highly useful when you are looking at the information contained in a variable rather than changing variables' data. Newbie Hack did an excellent job explaining
pointers
.
Now, whenever the
Serial_Print
function is called it starts the loop contained. The loop (
line 60, code v02
) continues to point out each value contained in the string
until
it comes across a "0" at which point it exits the loop, and subsequently, the function call.
The above code provided the following output in the serial monitor. (ALABTU!)
/>
At this point my simple mind was quite pleased with its trite accomplishments and I saw building a library out of my code being pretty easy. But a few problems I had to solve first:
A. Dynamic baud rate initialization.
In Arduino C
Serial.begin(9600)
initializes the serial connection and sets the baud rate. This is dynamic regardless of running an Arduino Uno at 1mhz or Arduino Mega at 16mhz. I wanted the same functionality; being able to set the baud rate by passing it to the intialization function,
uart_init()
.
I solved this by adding the formula in the
uart_init()
function (see
lines 21 and 38 of code v03
). In short, the F_CPU macro contains whatever speed the microcontroller is set, in my case 8mhz, and the user knows what baud rate he wants the code set, so I had all the pieces for to solve the UBBR equation. I made F_CPU part of the calculation and allowed the uart_init() to pass the desired baud rate to the formula. This allowed me to set the baud rate simply by passing the uart_init() function whatever baud rate I wanted. e.g.,
uart_init(9600);
B. Carriage-return and line-feed at end-of-transmission (EOT).
In Arduino C every time you send serial data,
Serial.print("What's up mother blinkers!?")
, there are two characters added. If you are as new to the world of microcontrollers as me, you may have had headaches finding where these extra characters came from whenever you printed something serially. Arduino C's
Serial.Print()
function automatically adds the carriage-return and line-feed characters. In
ASCII
that's, "13" and "10" and in hex, "0x0A" and "0x0D" respectively. Arduino C does this, I believe, as a protocol flagging the end of a transmission. This is helpful for the serial receiver to parse the data.
To solve this I simply created two functions
CR()
and
LF()
that would transmit the hex code for the line-feed character and the carriage-return. I went this route because not
every
serial devices excepts them, for instance, the HM-10 that I'm in a love-hate with excepts no characters following the AT commands you send it. I wanted an easy way to send these characters, but not so embedded I had to pull my hair out trying
not
to send them.
The above code provided the following output. Notice my serial monitor automatically recognized the CR and LF character, which is why "ALABTU!" is one per line, and always left-justified.
Booyah!
/>
Ok. I'm not done yet, here is what I'll be working on in the evening over the next few days,
Receiving data is a little more complex...
a little.
2. RX is less easy
I started by reviewing Newbie Hack's code
One Way Communication from Chip-to-Chip
, more specifically, his code about the receiving chip. I skipped the part about intilization, since I'd already done that and went straight to his receiving code,
include<avr/io.h>intmain(void){DDRB|=(1<<PINB0);//Communication UART specifications (Parity, stop bits, data bit length)intUBRR_Value=25;//This is for 2400 baudUBRR0H=(unsignedchar)(UBRR_Value>>8);UBRR0L=(unsignedchar)UBRR_Value;UCSR0B=(1<<RXEN0)|(1<<TXEN0);UCSR0C=(1<<USBS0)|(3<<UCSZ00);unsignedcharreceiveData;while(1){while(!(UCSR0A&(1<<RXC0)));receiveData=UDR0;if(receiveData==0b11110000)PORTB^=(1<<PINB0);}}
This code receives data and turns on/off a LED if anything was received. It doesn't concern itself with the values received, just whether
something
was received.
I was able to replicate this code and get the LED to switch states, but I quickly noticed a problem. The
While
loop on
line 16
is stuck in checking to see if anything has been received, continuously. The problem is apparent; this freezes the microcontroller from doing anything else. Damnit.
Alright, need a different solution; sadly, the solution was something I'd been avoiding for a year, the use of
interrupts
.
I'm not the sharpest when it comes to electronics, before July 2012 all I'd ever done with electronics was turned'em on and checked Facebook. (By the way,
up yours Facebook.
)
Since my hardware education began I've avoided learning about interrupts because they've intimidated me.
I won't go into interrupts here, since I'm just learning about them. But I'll mention there are two types,
internal and external
.
Internal interrupts are generated by the internal hardware of a microcontroller and are called
software interrupts,
because they are genereated by the CPU as a result of how it is coded.
External interrupts
are voltages delivered to a pin on the microcontroller. Also, interrupts essentially cause the CPU to put a bookmark in the code it was reading, run over and take care of whatever, then when finished, come back to the bookmarked code and continues reading.
That stated, I'd refer you to Newbie Hack's tutorials on
AVR interrupts
. It's excellent. Also,
Abcminiuser
over at AVR Freaks provided an
excellent tutorial
on AVR interrupts.
Ok. Back to my problem.
So, I dug in the
ATtiny1634 datasheet
(pg 168) and found the ATtiny1634 has an interrupt that will fire whenever the RX data buffer is full. To activate this interrupt we have to do two things, enable global interrupts and set the RXCIE0 bit on the UCSR0B register. This seemed pretty straight forward, but I found a
AVR Freaks tutorial
that helped explain it anyway.
Caveat
, I'm learning to re-read which register a bit is found. Occasionally, I'm finding myself frustrated a piece of code is not working, only to realize I'm initializing a bit on an incorrect port. For example,
UCSR0D |= (1<<RXCIE0)
will compile fine, but it would actually be enabling the bit RXSEI, which is the bit you set to enable an interrupt at the
start
of a serial data receive. This happens because the names of registers and bits are part of the AVR Core library, but they are simply macros for numbers. In the case of RXCIE0, it actually represents 7, so coding
UCSR0D |= (1<<RXCIE0)
is simply setting the 7th bit on the
wrong register
. Not that I did that or something.
Alright, I now have the interrupt setup for when the ATtiny1634 is
done
receiving a byte.
Of course, I didn't add a character to character array conversion, yet. I'm not sure if I want to add this to current function. I personally would rather handle my received characters on a project specific basis. But it should really be as simple as adding character array, then a function to add each character received to the array until it is full. Then, decide what to do when the character array is full.
But Code v04 gave me the following output:
/>
Each time the letter "A" is sent from the serial terminal a RX interrupt event occurs. The interrupt transfers the byte to a variable that is then sent right back out by the Serial_Print() function. Thus, echoing the data you send it.
3. Fully Interrupted
Ok, so, interrupts are a little tricky. Well, one trick.
When you are using an interrupt that modifies a variable anywhere else your main that modifies the same variable, you'll need to disable the interrupt before the modification.
It prevents corrupt or incomplete data.
Also, I am using a poor man's buffer. It's a simple buffer that overwrites itself and requires an end-of-transmission character, in my case, a "." from the transmitter to know where to cap the buffer. Still, I believe this will work for a lot of what I'd like to use it.
I do foresee a problem when I enable the second UART on the Tiny1634, since really, only one RX interrupt can run the show. We'll see. I'm a little tired to detail things here, but here is the code I ended with and I tried to comment the hell out of it.
One of the other things I did was enable the sleep mode on the Tiny1634. It is setup on line 39 and part of the main loop. It wakes on receiving serial data. I've not tested the power consumption, but this is
supposed
to make the
chip drop down to ~5uA.
I was surprised. The interrupts didn't seem to trip each other up. Of course, I only did a simple test of sending data from one terminal into the ATtiny1634 and having it come out on the other terminal. This would be: Data-->RX0--->TX1 and Data-->RX1-->TX0
So, there really shouldn't be any reason the code would trip out, since the RX0 and RX1 interrupts aren't firing at the same time. I'll create a library from this code, and as I start using the library in applications I'll do more debugging and improvement. Also, if anyone is bored and wants to critique the code, I've got my big boy pants on, I'd appreciate the criticism.
4.
All Together!
It only took me 30 minutes or so to convert the UART code to a library. Here it is, a UART library consisting of 12 functions.
USART_init0()
USART_init1()
USART_Transmit0()
USART_Transmit1()
Serial_Print0()
Serial_Print1()
ClearBuffer0();
ClearBuffer1();
LF0()
LF1()
CR0()
CR1()
Functions numbered 0 relate to serial lines 0, which are pins PA7 (Rx0) and PB0 (Tx0). The functions numbered 1 are serial lines 1, which are pins PB1 (Rx1) and PB2 (Tx1).
USART_init
Initializes a serial lines. Enables TX and RX pins, assigns the baud rate, and enables RX interrupt on receive. It also sets the communication as 8 bit, 1 stop-bit, and non-parity.
USART_Transmit
Will transmit a single character.
Serial_Print
Prints a string.
ClearBuffer
Empties the receiving buffer.
LF and CR
Transmit a line-feed or carriage-return character.
#ifndef UART_1634#define UART_1634#include<avr/interrupt.h> //Add the interrupt library; int. used for RX.//Buffers for UART0 and UART1//USART0charReceivedData0[32];//Character array for Rx data.intReceivedDataIndex0;//Character array index.intrxFlag0;//Boolean flag to show character has be retrieved from RX.//USART1charReceivedData1[32];//Character array for Rx data.intReceivedDataIndex1;//Character array index.intrxFlag1;//Boolean flag to show character has be retrieved from RX.//Preprocessing of functions. This allows us to initialize functions//without having to put them before the main.voidUSART_init0(intBUADRATE);voidUSART_Transmit0(unsignedchardata);voidSerial_Print0(char*StringOfCharacters);voidclearBuffer0();voidUSART_init1(intBUADRATE);voidUSART_Transmit1(unsignedchardata);voidSerial_Print1(char*StringOfCharacters);voidclearBuffer1();//EOT characters.voidLF0();voidCR0();//EOT characters.voidLF1();voidCR1();// function to initialize UART0voidUSART_init0(intDesired_Baudrate){//Only set baud rate once. If baud is changed serial data is corrupted.#ifndef UBBR//Set the baud rate dynamically, based on current microcontroller//speed and the desired baud rate given by the user.#define UBBR ((F_CPU)/(Desired_Baudrate*16UL)-1)#endif//Set baud rate.UBRR1H=(unsignedchar)(UBBR>>8);UBRR1L=(unsignedchar)UBBR;//Enables the RX interrupt.//NOTE: The RX data buffer must be clear or this will continue//to generate interrupts. Pg 157.UCSR1B|=(1<<RXCIE1);//Enable receiver and transmitterUCSR1B|=(1<<RXEN1)|(1<<TXEN1);//Set frame format: 8data, 1 stop bitUCSR1C|=(1<<UCSZ00)|(1<<UCSZ01);// 8bit data format//Enables global interrupts.sei();}// Function to initialize UART1voidUSART_init1(intDesired_Baudrate){//Only set baud rate once. If baud is changed serial data is corrupted.#ifndef UBBR//Set the baud rate dynamically, based on current microcontroller//speed and the desired baud rate given by the user.#define UBBR ((F_CPU)/(Desired_Baudrate*16UL)-1)#endif//Set baud rate.UBRR0H=(unsignedchar)(UBBR>>8);UBRR0L=(unsignedchar)UBBR;//Enables the RX interrupt.//NOTE: The RX data buffer must be clear or this will continue//to generate interrupts. Pg 157.UCSR0B|=(1<<RXCIE0);//Enable receiver and transmitterUCSR0B|=(1<<RXEN0)|(1<<TXEN0);//Set frame format: 8data, 1 stop bitUCSR0C|=(1<<UCSZ00)|(1<<UCSZ01);// 8bit data format//Enables global interrupts.sei();}//USART0voidUSART_Transmit0(unsignedchardata){//We have to disable RX interrupts. If we have//an interrupt firing at the same time we are//trying to transmit we'll lose some data.UCSR0B^=((1<<RXEN0)|(1<<RXCIE0));//Wait for empty transmit bufferwhile(!(UCSR0A&(1<<UDRE0)));//Put data into buffer, sends the dataUDR0=data;//Re-enable RX interrupts.UCSR0B^=((1<<RXEN0)|(1<<RXCIE0));}//USART1voidUSART_Transmit1(unsignedchardata){//We have to disable RX interrupts. If we have//an interrupt firing at the same time we are//trying to transmit we'll lose some data.UCSR1B^=((1<<RXEN1)|(1<<RXCIE1));//Wait for empty transmit bufferwhile(!(UCSR1A&(1<<UDRE1)));//Put data into buffer, sends the dataUDR1=data;//Re-enable RX interrupts.UCSR1B^=((1<<RXEN1)|(1<<RXCIE1));}//This functions uses a character pointer (the "*" before the StringOfCharacters//makes this a pointer) to retrieve a letter from a temporary character array (string)//we made by passing the function "ALABTU!"//USART0voidSerial_Print0(char*StringOfCharacters){UCSR0B^=((1<<RXEN0)|(1<<RXCIE0));//Let's do this until we see a zero instead of a letter.while(*StringOfCharacters>0){//This function actually sends each character, one by one.//After a character is sent, we increment the pointer (++).USART_Transmit0(*StringOfCharacters++);}//Re-enable RX interrupts.UCSR0B^=((1<<RXEN0)|(1<<RXCIE0));}//USART1voidSerial_Print1(char*StringOfCharacters){UCSR1B^=((1<<RXEN1)|(1<<RXCIE1));//Let's do this until we see a zero instead of a letter.while(*StringOfCharacters>0){//This function actually sends each character, one by one.//After a character is sent, we increment the pointer (++).USART_Transmit1(*StringOfCharacters++);}//Re-enable RX interrupts.UCSR1B^=((1<<RXEN1)|(1<<RXCIE1));}//USART0voidclearBuffer0(){//Ugh. A very inefficient way to clear the buffer. :PReceivedDataIndex0=0;for(unsignedinti=0;i<64;){//We set the buffer to NULL, not 0.ReceivedData0[i]=0x00;i++;}}//USART1voidclearBuffer1(){//Ugh. A very inefficient way to clear the buffer. :PReceivedDataIndex1=0;for(unsignedinti=0;i<64;){//We set the buffer to NULL, not 0.ReceivedData1[i]=0x00;i++;}}voidLF0(){USART_Transmit0(0x0A);}//Function for sending line-feed character.voidCR0(){USART_Transmit0(0x0D);}//Function for sending carriage-return character.voidLF1(){USART_Transmit1(0x0A);}//Function for sending line-feed character.voidCR1(){USART_Transmit1(0x0D);}//Function for sending carriage-return character.ISR(USART0_RX_vect){//RX0 interrupt//Show we have received a character.rxFlag0=1;//Load the character into the poor man's buffer.//The buffer works based on a end-of-transmission character (EOTC)//sent a the end of a string. The buffer stops at 63 instead of 64//to always give room for this EOTC. In our case, "."if(ReceivedDataIndex0<63){//Actually pull the character from the RX register.ReceivedData0[ReceivedDataIndex0]=UDR0;//Increment RX buffer index.ReceivedDataIndex0++;}else{//If the buffer is greater than 63, reset the buffer.ReceivedDataIndex0=0;clearBuffer0();}}ISR(USART1_RX_vect){//RX1 interruptPORTA^=(1<<PINA6);//Show we have received a character.rxFlag1=1;if(ReceivedDataIndex1<63){//Actually pull the character from the RX register.ReceivedData1[ReceivedDataIndex1]=UDR1;//Increment RX buffer index.ReceivedDataIndex1++;}else{//If the buffer is greater than 63, reset the buffer.ReceivedDataIndex1=0;clearBuffer1();}}#endif
Really, it is all the functions moved over to a header file (.h). One thing I'll point out, the #ifndef makes sure the header file is not included twice, but I was getting an error with it for awhile, come to find out, you
cannot
start #define name for #ifndef with a number, e.g.,
// UART Example on the ATtiny1634 using UART0.// C. Thomas Brittain// letsmakerobots.com#define F_CPU 8000000UL //AVR clock frequency in Hz, used by util/delay.h#include<avr/io.h> //Holds Pin and Port defines.#include<util/delay.h> //Needed for delay.#include<avr/sleep.h> //Needed for sleep mode.#include"1634_UART.h"// Mainintmain(){//Setup received data LED.DDRA|=(1<<PINA6);//Light LED on PA6 to show the chip has reboot.PORTA^=(1<<PINA6);_delay_ms(500);PORTA^=(1<<PINA6);//Initialize the serial connection and pass it a desired baud rate.USART_init0(19200);USART_init1(19200);//Set Sleepset_sleep_mode(SLEEP_MODE_IDLE);//Forever loop.while(1){//ReceivedData = "ASDASDAS";sleep_mode();//USART0if(ReceivedData0[(ReceivedDataIndex0)-1]==0x2E){//Function to print the RX bufferSerial_Print1(ReceivedData0);//Let's signal the end of a string.LF1();CR1();//Ending characters.//After we used the data from buffer, clear it.clearBuffer0();//Reset the RX flag.rxFlag0=0;}//USART1if(ReceivedData1[(ReceivedDataIndex1)-1]==0x2E){//Function to print the RX bufferSerial_Print0(ReceivedData1);//Let's signal the end of a string.LF0();CR0();//Ending characters.//After we used the data from buffer, clear it.clearBuffer1();//Reset the RX flag.rxFlag1=0;}}}
This program is the same as above, but using the library. It simply takes data receiving from one UART and send its out the other.
Alright, that's enough UART for awhile. I might update this when I run into bugs,
which I will, I am a hack.
So, use this code at your own risk of frustration.
Stuff I'd no energy to finish.
Implement a
circular-buffer
(if I get smart enough to do it, that is).
At least making the buffer size user definable. :)
After I was able to get my motors moving using the SN754410 I became a little obessessed with understanding AVR PWM architecture. There are several tutorials that helped me a lot:
In the end, I ripped maxEmbedded code and got my PB3 LED working in about 10 minutes. Then, I spent the next three evenings reading trying to figure out what maxEmbedded's code was doing.
Really, it was the register and bit names that were tripping me up. Each had names like, "TCCROA1" and "OCR0A", and so forth. Each is an
initialism
. This was a problem for me, I was soon lost in a jungle of intialisms, which represented abstract concepts, such as other intialisms. I felt as if I were bumbling through a
George MacDonald
dissertation on an orc language:
NOTE: Dear reader, I apologize if that video confused you more. Again, this is a journal so to help me remember what I learn. And I find adding a story to ridicules abstractions is necessary for me.
Alright, now that I had a little story in my head to handle the intialisms learning PWM on the AVR flowed a little easier.
Here is my reference list:
1. TCCR = Timer/Counter Control Register.
On the ATtiny1634 there are 4 control registers. One is 8-bit and the other is 16-bit. Though, this journal will stick with the Arduino standard, meaning, I'll use my 16-bit as an 8-bit. Here are the four Timer/Counter Control Register names:
TCCROA (8-bit)
TCCROB (8-bit)
TCCR1A (16-bit)
TCCR1B (16-bit)
TCCROA (8-bit timer) and TCCROB (16-bit timer) control the PWM functions of pins.
TCCROA/B control pins PA5 and PA6.
TCCR1A/B control pins PC0 and PB3.
2. COM = Compare Output Mode
There are four bits per TCCR register that control the compare output of each pin. This is where the magic happens. If a pin is setup in compare output mode, it will only go high when the counter is equal to or higher than a number you provide. For instance,
Is timer greater than 100? Then go high.
This is the essence of PWM. You provide a number, in our case a number between 0-255 since it is an 8-bit counter, and if the timer is equal to or greater than your number, the pin will be HIGH. Then, the timer will continue to count up and will reset to 0 after 255 is reached. Mind you, the comparison is made every tick of the counter, so when it resets to 0 the comparison will be made and the pin will go LOW ago.
Voila!
There are four COM bits in each TCCR register, two control the output of one pin.
Found in TCCR0A:
COM0A0 and COM0A0 control pin PC0.
COM0B0 and COM0B0 control pin PA5.
Found in TCCR1A:
COM1A0 and COM1A1 control pin PB3.
COM1B0 and COM1B1 control pin PA6.
Now, switching these bits can create many different types of output. But I stuck with Arduino standard.
/>
3. WGM = Wave Form Generation (for 8-bit)
There are 3 bits that control the type of PWM we end up with. There are all sorts of wave-forms, but the main three are:
Phase Correct
CTC
Fast PWM
(
Here
is an Arduino article that explains them a bit.)
The one I'll invoke is Fast PWM,
/>
We select this by setting WGM00 and WGM01 bits.
4. How to set the TCCR registers.
So, setting things up, the code will look something like this,
// Demonstration of PWM on an ATtiny1634.// C. Thomas Brittain#define F_CPU 8000000 // AVR clock frequency in Hz, used by util/delay.h#include<avr/io.h>#include<util/delay.h>//Initialize PWMvoidpwm_init(){//This is the first PWM register, TCNT0. It is 8 bit. Both PIN PA5 and PA6 are set to clear on compare,//then set at bottom; this makes them non-inverting. The WGM bits are set to for "Fast PWM MODE"//and this clears at the top, "0x00FF."TCCR0A=0b10100011;// WORKS FOR OC0A, OC0BTCCR0B=0b00000001;// WORKS FOR OC0A, OC0B//This is the second PWM register;TCNT1. It is 8 bit. Both PIN PB3 and PC0 are set to clear on compare,//then set at bottom; this makes them non-inverting. The WGM bits are set to for "Fast PWM MODE"//and this clears at the top, "0x00FF."TCCR1A=0b10100001;//WORKS FOR OC1A, OC1BTCCR1B=0b00001001;//WORKS FOR OC1A, OC1B//This sets the PWM pins as outputs.DDRB|=(1<<PINB3);DDRA|=(1<<PINA5);DDRA|=(1<<PINA6);DDRC|=(1<<PINC0);}
I left the assignment of the TCCR registers in a binary format. This was just easier for me, but you could as easily use bitwise operations, e.g.,
TCCR1A|=(1<<COM1A1)|(1<<WGM01)
You notice we set the COM0A1 or COM1A1 bits, but later I'll change this so they are not set at initialization. I found if you connect the pins to the timers at the beginning, then they'll constantly have a nominal voltage on them. This is made clearer if you have an LED on the pin. Therefore, unless you set the COM0A1 and COM1A1 bits low then the LED will never fully turn off.
Also, we have to set the data direction registers for the PWM pins to outputs.
Now, that the initialization is done, let's look at the code I used to demonstrate PWM on the ATtiny1634.
intmain(){uint8_tbrightness;// initialize timer0 in PWM modepwm_init();//Setup several duty-cycle counters to show differential PWM channels.uint8_tbrightness2=0;uint8_tbrightness3=0;uint8_tbrightness4=0;//Let's only do this 3 times before turning PWM off.for(intcounterB=0;counterB<2;++counterB){//The main duty PWM cycle counter will also be our loop counter. (0-255)for(brightness=255;brightness>0;--brightness){// set the brightness as duty cyclebrightness2=brightness2+1;brightness3=brightness3+2;brightness4=brightness4+10;OCR0A=brightness;// PCO0OCR0B=brightness2;// PA5OCR1A=brightness3;// PB3OCR1B=brightness4;// PA6//Delay to make changes visible._delay_ms(40);}//After 3 loops clear the PWM channels by setting COM0A1 and COM0B1 bits low.//If this is not done then there will be a nominal voltage on these pins due to//the internal pull-ups setting them as outputs.TCCR0A=0b00000011;// WORKS FOR OC0A, OC0BTCCR1A=0b00000011;// WORKS FOR OC0A, OC0B}}
You'll notice this is a modified "Fade" sketch from the Arduino world.
The above code provided this output,
How the magic happens in AVR is around the output comparison registers,
OCR0A -- controls PC0
OCR0B -- controls PA5
OCR1A -- controls PB3
OCR1B -- controls PA6
Basically, the OCR registers flip the pin HIGH or LOW (as setup by the TCCR) based upon the number you assign to it. If you assign OCR0A a value you of 144, it'll be LOW (0v) for 144 clock cycles (TCNT) and HIGH (5v) for 111 clock cycles. This gives us our PWM. Booyah!
OCROA = 127;
This sets PC0 to approximately 2.5v. (127/255bit * 5v = ~2.5v)
OCR1A = 255;
This sets PB3 to 5v. (255/255bit * 5v = 5v)
Ok, here's the tricky one,
OCR0A = 0;
This should set PC0 to 0v, but that's not the case. When we set the COM registers (COM0A1, etc.) there are internal pull-up resistors connected to the corsponding pin. This results in a constant nominal voltage unless the COM register is set low again.
This can be done using the XOR operator on the TCCR register,
TCCRO ^= (1<<COM0A0)
This should set the PC0 pin to 0v.
It's really that simple...well, unless you want to mess with the type of PWM you are creating. Ugh.
5. ATtiny1634 analogWrite.h
After I figured out how to use PWM on the ATtiny1634, I started thinking how nice it would be to re-create the Arduino library for it.
Being able to write,
analogWrite(pin, strength)
had a lot of appeal to me.
I played with it a bit and ended up with the following,
#ifndef analogWrite1634#define analogWrite1634#include<avr/io.h>#include<util/delay.h>voidanalogWrite(intPWM_PinSelect,intduty);// initialize PWMvoidpwm_init(){//Define PWM pins.#define PWM_PC0 1#define PWM_PA5 2#define PWM_PA6 3#define PWM_PB3 4//This is the first PWM register, TCNT0. It is 8 bit. Both PIN PA5 and PA6 are set to clear on compare,//then set at bottom; this makes them non-inverting. The WGM bits are set to for "Fast PWM MODE"//and this clears at the top, "0x00FF."TCCR0A=0b00000011;// WORKS FOR OC0A, OC0BTCCR0B=0b00000001;// WORKS FOR OC0A, OC0B//This is the second PWM register;TCNT1. It is 8 bit. Both PIN PB3 and PC0 are set to clear on compare,//then set at bottom; this makes them non-inverting. The WGM bits are set to for "Fast PWM MODE"//and this clears at the top, "0x00FF."TCCR1A=0b00000001;//WORKS FOR OC1A, OC1BTCCR1B=0b00001001;//WORKS FOR OC1A, OC1B//This sets the PWM pins as outputs.DDRB|=(1<<PINB3);DDRA|=(1<<PINA5);DDRA|=(1<<PINA6);DDRC|=(1<<PINC0);}voidanalogWrite(intPWM_PinSelect,intduty){//Make sure we were passed a number in-range.if(duty>255)duty=255;if(duty<1)duty=0;//Sets PWM for PC0if(PWM_PinSelect==1){if(duty>0){TCCR0A|=(1<<COM0A1);OCR0A=duty;}else{TCCR0A^=(1<<COM0A1);}}//Sets PWM for PA5if(PWM_PinSelect==2){if(duty>0){TCCR0A|=(1<<COM0B1);OCR0B=duty;}else{TCCR0A^=(1<<COM0B1);}}//Sets PWM for PA6if(PWM_PinSelect==3){if(duty>0){TCCR1A|=(1<<COM1B1);OCR1B=duty;}else{TCCR1A^=(1<<COM1B1);}}//Sets PWM for PB3if(PWM_PinSelect==4){if(duty>0){TCCR1A|=(1<<COM1A1);OCR1A=duty;}else{TCCR1A^=(1<<COM1A1);}}}#endif
A synopsis of the library,
Lines 1-2 and 90 make sure the library is only included once.
Lines 13-16 define the ATtiny1634 pins.
18-28 setup the TCCR registers (notice, the pins start out off to prevent nominal voltage).
41-42 makes sure our PWM value is in range.
46-85 control the PWM on each pin, with an else statement to gives us a true zero voltage in the case a PWM value of 0 is passed to the function.
I saved this as
1634analogWrite.h
and then wrote a sketch to use
// program to change brightness of an LED// demonstration of PWM//void Tiny1634_PWM(int PWM_PinSelect, int duty);#define F_CPU 8000000 // AVR clock frequency in Hz, used by util/delay.h#include<avr/io.h>#include<util/delay.h>#include"1634analogWrite.h"intmain(){uint8_tbrightness;// initialize timer0 in PWM modepwm_init();intbrightness2=255;intbrightness3=255;intbrightness4=255;// run foreverwhile(1){for(brightness=255;brightness>-1;--brightness){analogWrite(PWM_PC0,brightness);analogWrite(PWM_PB3,brightness2);analogWrite(PWM_PA5,brightness3);analogWrite(PWM_PA6,brightness4);_delay_ms(10);brightness2=brightness2-5;brightness3=brightness3-10;brightness4=brightness4-15;if(brightness==0){_delay_ms(1000);}if(brightness2<0)brightness2=255;if(brightness3<0)brightness3=255;if(brightness4<0)brightness4=255;}}}
Ok. I'll revisit this probably with a complete H-Bridge control library.
As always, please feel free to correct my f'ups.
:)
I printed a body and added BLE. I'll explain tomorrow after I get some rest, but the BLE was to allow me to test directed locomotion. I've also done some feature testing (load-sharing, charging circuit, "hunger" ADC), the board is actually a good design. Works well.
The BLE is the HM-11, itty-bitty BLE.
My goal is to test the physical and feature designs with the ATtiny84, and when Mr. Bdk6 releases his toolchain for the LPC1114, switch it as the controlling chip.
This is my version of Yahmez'
Baby Bot
, the ATtiny84 Y-Baby (YB84). There are few differences from Yahmez' version.
This version uses an ATtiny84.
It uses a LIR2032.
It has a charge circuit built in, using the MCP73831. This circuit has load-sharing capability so the baby can "feed" without sleeping.
The YB84 has two LED indicators.
One pin on the YB84 monitors the battery voltage, so it can tell how "hungry" it is.
This version came about because Yahmez' Baby Bots were so damn cool I had to copy them. Here's the
node
where I asked permission and added design notes. Also, I've wanted to make a small, cheap, small robot to couple with my
Overlord
projects in hope to develop an electronic lab-rat.
Note, I've not included the IR receiver or IR transmitters in the BOM. I've not tested the circuit yet, or sourced cheap parts. But I'm shooting to keep them under $10.
YB84 BOM Total: $7.70
YB84 v_05
/>
Really, there wasn't much to developing this little guy, Yahmez had done all the work. I simply selected an Atmel uC that I felt was cheap enough and provided enough pins to accomplish what I wanted to do with the little guy. The one problem I had was with the
load-sharing circuit
I tried to copy from Zak Kemble.
When I went to layout the load-circuit my mind got locked on the old thought, "MOSFET diodes go against the current." This caused me to lay the DMP1045U down backwards, which essentially shorts the battery.
This took me a bit to figure out. I apparently wasn't the only one that made the mistake, as a comment on Zak's blog had a fellow asking my questions for me. In the end, I got the circuit sorted out and now the little guy works as intended.
That's about it for now. I still have lots of testing to do on the little guy.
Motor placement for correct movements.
Leg angling for correct gait.
IR-RX circuit.
IR-TX circuit.
Currently, I have a pogo-pin programming header. But it is
imperative
to accomplish my goals for this little guy to make him programmable via IR. This should allow me to program a swarm of these little guys without manual interaction. I know the Kilotbot projects modified the Arduino code to do this very thing. My ideal setup is to add a mobile hanging over a swarm of these guys. On this mobile would be: IR-TX, IR-RX, and a camera. The camera would be using
Overlord
to track these guys and the IR to communicate with them in mass.
As always, thoughts, opinions, and critiques I welcome :)
Here are some random notes on working with the HM-10.
Working RX/TX LEDs
How upgrade the HM-10
Pseudo Star-Networking HM-10s
Working RX/TX LEDs
I spent some time trying to find a way to create RX/TX traffic LEDs for the HM-10 breakout. This might be easy for some, but it was a real thinker for me. The HM-10 is TTL, which as it was explained me, means that the line is high while idling and low to represent data. The problem here is the typical LED setup doesn't work. Sadly, this is the setup I used in two of my fabricated boards.
/>
Well, this stupid mistake has been staring me in the face. Especially since a few guys ordered my board and mentioned politely, "It only flashes when large amounts of data go through."
After asking around I was told the best way to approach this problem was to use a PNP transistor. The guys at LMR pretty much gave me the solution
here
. The people here are brilliant. (Please don't tell them I'm not, I want to hang with the cool-kids for a bit before they find out my mom still dresses me.)
But while LMR was helping me I found Sparkfun's solution to the problem on one of their
Xbee Explorer boards
. In essence, the LEDs are wired from in between 3.3v and the TX/RX lines, this allows them to act as sinks whenever the data is coming through. As long as the LED is a green, blue or other with a 3.1v drop, then the voltage being sunk doesn't interfere with the data.
Of course, this is risky. The
CC2540
is a nifty chip, but it isn't meant to be a high-current uC. I dug through the datasheet to see what the current sink rating of the RX/TX pins (2 & 3) were. Well...it's not in the datasheet! But then I came across this
post
.
Well, there we go. So, I breadboarded a circuit and found it worked. But I was only brave enough to use a 1k resistor.
Eventually
Brassfly
helped me work through the math,
"Given that the voltage drop across the forward biased junction of a red LED is about 2 Vdc (we will call that Vf) the total current through the LED/Resistor is equal to Vsupply-Vf/R, or in this case 3.3V-2V/1000=.0013A=1.3mA....If they are bright enough then don’t worry about it. If not, you might then consider using a 470 ohm resistor (2.7mA) or even 330 ohm resistor (3.9mA)."
So, I made up a fresh version of the HM-10 breakout board (v.9.9) with this LED setup. I wired it up. And, it seems to be working.
/>
Again, can't use yellow or red LEDs on the RX/TX lines, since they do not create a high-enough voltage drop to signal the CC2540 low).
How upgrade the HM-10
(NOTE:
You can only upgrade versions 507 or later, according to Jnhuamoa)
1. Visit the HM-10
website
and learn
all
about the HM-10 upgrade process.
/>
2. Download the lastest firmware version file. (Make sure your HM-10 is a CC2540, if it's CC2541 use that file).
/>
3. Before we proceed, here's my bitchy disclaimer. Re-read the instructions and b_
eware all ye who try to upload firmware and don't blame me for problems, like the death of your HM-10 :P
_
4. Open
Realterm
(or your preferred serial terminal).
5. Wire your HM-10's serial connection as described in
my earlier post
.
6. You are about to cross the point of no return. Open a serial connection to the HM-10 and if you are prepared for the worst, type: "AT+SBLUP" and the module should reply, "SBLUP+OK." Congratulations, you've bricked your HM-10--well, at least until the upgrade process is complete.
7. Now,
CLOSE YOUR SERIAL CONNECTION
in Realterm. Yes, I forgot to close the connection myself and was pissed because I thought I had bricked my HM-10 when I tried the next step. I'm a hack, hacking with a hacksaw.
8. Unzip the "HMSoft-10-2540-V522.zip" (or the latest version, respectively) into a folder. There should be several files in the folder,
open HMSoft.exe
9. Now,
click on the ellipsis and select "HMSoft.bin"
file. Then, type the number of your com port. You don't need to include anything but the number (e.g., COM34 becomes 34).
/>
10. Pray
(for the HM-10 this works best if to
Nyarlathotep
).
11. Click "Load Image." The upload process should start pretty quick and should take approximately a minute and a half to complete.
Do not remove power or screw with the wiring until you see the following:
/>
12. Click "Ok" and open Realterm. Bring up a serial connection and type: "AT+VERS?" It should respond, "HMSoft v521." That's not a typo, even though we uploaded the V522 version it responds saying it is V521? You got me. But it works ok :)
/>
Pseudo Star-Networking HM-10s
Setup up at least three units.
Unit #1 ("Master")
AT+ROLE2
AT+IMME1
AT+CONxxxSLAVE#1xxxx
Unit #2 (Slave #A)
AT+ADDR? Write the address down. Mine replied, "OK+ADDR:883314DD8015"
AT+MODE1
Unit #3 (Slave #B)
AT+ADDR? Write the address down.Mine replied, "OK+ADDR:883314DD8016"
AT+MODE1
Oh, one more bit. You need to wire pin 4 on the Arduino to the HM-10 Master's reset line. Since there really isn't anyway to reset the slave and the master at the same time. This gets us around the timeout for both, slave and master.
RESET<----1k Resistor----->D4 on Arduino
Then use the following code, changing your addresses respectively.
// Crap code for HM-10 pseudo-Networking// By the crappy code Thomas Brittain, aka, Ladvien.StringinputString="";// a string to hold incoming databooleanstringComplete=false;// whether the string is completeString inputString = ""; // a string to hold incoming datafloattime;floatoldTime;voidsetup(){// initialize serial:Serial.begin(9600);pinMode(4,OUTPUT);digitalWrite(4,LOW);}voidHM10Reset(){Serial.print("AT+RESET");delay(220);digitalWrite(4,HIGH);delay(100);digitalWrite(4,LOW);delay(150);}voidloop(){// print the string when a newline arrives:Serial.write("AT+CON883314DD8016");delay(150);Serial.print("From first node! Seconds ago last here: ");time=millis();Serial.println((time-oldTime)/1000);oldTime=millis();delay(250);HM10Reset();Serial.write("AT+CON883314DD8015");delay(150);Serial.println("From second node!");delay(150);HM10Reset();}voidserialEvent(){while(Serial.available()){// get the new byte:charinChar=(char)Serial.read();// add it to the inputString:delay(50);inputString+=inChar;stringComplete=true;}}
Not going to lie. I'm pretty dissapointed with how complicated the firmware makes it to switch between nodes. Although, I've only begun to play with firmware versions greater than V303.
I couldn't do much better than about 2.84 seconds switching between nodes. This simply wont do for me. And, of course, this rate goes up with more nodes. So, a swarm of little robots controlled this way would be unmanagable.
I tried tweaking the timing of everything in the code. The HM-10 wasn't having it. If I lowered the delay following an AT command it, the command wouldn't take. This would often cause the nodes to become stuck (waiting for timeout, still connected, etc.) Also, the hardware reset on the HM-10 is said to be 100ms, but I'm finding it unhappy with much less than 250ms.
Anyway, if anyone else wants to carry the banner my suggestion is uping the buad rate and sticking with hardware resets, like in my
ATtiny Bitsy Spider
board.
Awhile back Sparkfun posted a new product, their
MiniMoto
breakout board. It breaks out the
DRV8830
IC, which is a serially controlled (I2C) H-Bridge. I thought the chip was nifty. A few problems though,
Sparkfun's breakout was 25x25mm for
one
bridge. If I added another and then an Arduino Pro Mini it'd lose smallness.
It's $9.95
It's not on a purple board :)
So, I set out to make a robot controller with it that was smaller than a Sparkfun breakout. What I ended up with is a little bitch I refer to a Kobold.
/>
The board is pretty straightforward. It has an ATtiny 85 that acts as an I2C Master using the
SoftI2CMaster
library. This allows the Tiny 85 to control two motors using only two pins, leaving three for your pleasure.
My end goal will be to build a shield for it and hook up a HM-10 to make it a little wireless tethered bot. This would bring me down to one pin, which I'm sure will be some sort of range finder or feeling sensor.
I'm currently working on a second iteration to correct some problems. I'll also add a few features, like my pogo-pin programming interface. The shield I have designed for it will also include a charging circuit and probably a SMD step-up circuit that should convert a LiPo to a nice 5v.
Anyway, work in progress...just thought I'd share.
If anyone is interested in this board, please wait a few iterations. I get worried I'm making blue-smoke with someone else's money. :)
Here is the code running in the video:
//Sample Code for the Kobold Board.#define NO_INTERRUPT 1#define I2C_TIMEOUT 100#define SDA_PORT PORTB#define SDA_PIN 4#define SCL_PORT PORTB#define SCL_PIN 3#include<SoftI2CMaster.h>#include<avr/io.h>voidCPUSlowDown(intfac){// slow down processor by a facCLKPR=_BV(CLKPCE);CLKPR=_BV(CLKPS1)|_BV(CLKPS0);}booleanwriteSpeed(byteaddr,intspeedx){//This should clear the fault register.byteregValue=0x08;//Clear the fault status, in case there is one.if(!i2c_start(addr|I2C_WRITE)){returnfalse;}if(!i2c_write(0x01)){//0x01 = We want to write.returnfalse;}if(!i2c_write(regValue)){//Write the clear bye for fault register.returnfalse;}i2c_stop();//Stop transmission.//Let's convert the integer given us into a byte.regValue=(byte)abs(speedx);//Convert 0-63 to byte value to set speed.if(regValue>63)regValue=63;// Cap the value at 63.regValue=regValue<<2;// Left shift to make room for bits 1:0if(speedx<0)regValue|=0x01;// Set bits 1:0 based on sign of input.elseregValue|=0x02;//A negative number for reverse and positive for forward.//Now, let's move this sucker.//Sets the i2c slave addressif(!i2c_start(addr|I2C_WRITE)){returnfalse;}//0x00 = We want to write something.if(!i2c_write(0x00)){returnfalse;}//Writes the byte which had been converted from an integer that was passed this function. Annnnd! The motor moves!if(!i2c_write(regValue)){returnfalse;}i2c_stop();returntrue;}booleanwriteStop(byteaddr){if(!i2c_start(addr|I2C_WRITE)){returnfalse;}if(!i2c_write(0x00)){returnfalse;}if(!i2c_write(0x00)){returnfalse;}i2c_stop();returntrue;}//------------------------------------------------------------------------------voidsetup(void){#if I2C_CPUFREQ == (F_CPU/8)CPUSlowDown();#endif}voidloop(void){for(inti=0;i<=3;i++){delay(100);if(!writeSpeed(0xC0,10));if(!writeSpeed(0xCE,10));delay(1000);if(!writeStop(0xC0));if(!writeStop(0xCE));delay(1000);if(!writeSpeed(0xC0,-10));if(!writeSpeed(0xCE,-10));delay(1000);if(!writeStop(0xC0));if(!writeStop(0xCE));delay(100);}for(inti=0;i<=3;i++){delay(100);if(!writeSpeed(0xC0,14));if(!writeSpeed(0xCE,34));delay(1000);if(!writeStop(0xC0));if(!writeStop(0xCE));delay(1000);if(!writeSpeed(0xC0,-14));if(!writeSpeed(0xCE,-34));delay(1000);if(!writeStop(0xC0));if(!writeStop(0xCE));delay(100);}}
I thought I would journal my work as I begin to venture from the comfortable playground of Arduino C and IDE.
I've tried a few other IDEs and C++ to work with different chips. But each time I realize I don't know enough about C/C++, tool-chains, and workspaces to make a robot with them.
Bdk6 gave me an LCP1114 and I was able to get a blink program to run on it, but it was from a .bin file that someone else compiled, I simply uploaded it. I tried to work through two walkthroughs to get a programming environment setup (mbed and LPC1114). Bust on both.
I spent some time Googling, trying to find out what I was doing wrong. I came to the conclusion there was not enough information for an ignorant like me to figure out how to set up the workspace; the LPC1114 is an intermediate chip and I'm a beginner.
I decided to pull up tutorials on AVR programming. I knew there was an entire community around the Atmel chips, a community besides the Arduino community, a bare-metal community. I figured that would be the "beginner" environment to work in, since there would be enough documentation for me to learn
So, that brings us to my journal. I've not written this out to impress anyone. I simply find I learn better if I force myself to document what I'm doing. It encourages me to understand the information, since I have to explain it to someone else. Learning by verbal-processing. That being said, I invite criticism. Anything I've written that is incorrect, feel free to yell at me; it'll learn me. Also, a lot of this has been written; I know I'm not being original. I'm also not delusional in believing I explain it better, but I do plan on making this journal flow towards how AVR programming can help me build better robots. Ok. Disclaimer done.
What do you mean the silk-screen is mislabeled...shh.
After I got the pinout all figured out, I downloaded
Atmel Studio 6.1
. I know there are many different opinions about what IDE to use, and a lot of them seem to favor a text editor and AVRDude, for a change I wanted to go with a commercial IDE. Also, it seems like a lot of those in the AVRFreaks group actually
like
Atmel Studio.
It's pretty easy to set up. You install it. Plug in your AVR ISP MKII. Then, File-->New Project. Select "GCC C Executable Project" and name your project. Hit "Ok." Atmel Studio will bring up a list of supported chips. I scrolled down until I found my chip, "ATtiny1634." You'll notice the
datasheet
and supported programmers are to the side.
Alright, so, here I was. IDE all set up...um, now what do I do?
I began to Google until I found an AVR Tutorial Series that looked like it would bring me from the basics, well, up to Serial communication. Really, I figure if I could learn the following I could build whatever I wanted out of it:
So, I decided I would try to walk through all of his tutorials and see if I could apply them to the ATtiny1634. NOTE: The author of this series appears to be
Patrick Hood-Daniel
, a fellow Texan (don't hold that against us :P).
I started Newbie Hack's AVR Series after he had his programmer setup, his "First Program." The uC's version of the "hello world," the LED blink. In Arduino I'd accomplish this like so,
intled=13;voidsetup(){pinMode(led,OUTPUT);}voidloop(){digitalWrite(led,HIGH);// turn the LED on (HIGH is the voltage level)delay(1000);// wait for a seconddigitalWrite(led,LOW);// turn the LED off by making the voltage LOWdelay(1000);// wait for a second}
I got Newbie Hack's code going within 3 minutes
I looked down at my breakout board, I had some "PBx" pins, so I figured I had a Port B. I located pin PB0 (the the pin marked "1" in the above image) and I threw my LED and resistor on it.
/>
I uploaded the program and got this:
But the purpose of this journal is to
understand
what I'm doing
, not just copy it. So, the following is an explanation to myself, in case I forget stuff.
What's Going on in the Blinkin LED Code
Atmel chips are amazing. They are versatile little uCs and the way this versatility is utilized from programming is by changing
bits
within a
byte
. For example, a pin can work as either a INPUT or OUPUT, but how does the chip know which one? You change the Digital Direction Registry (DDR) Bit of the pin. The DDR bit is a little switch that can be flipped either on or off through programming. When it is off (0) the pin acts as an INPUT, when it is set on, it acts an OUTPUT.
Now, Atmel chips are divided into
ports
, and thee ports have 8 pins (or less). This allows one byte to control alot of the functions of one port.
Newbie Hacks (NB) does a great job of explaining this. He even draws out a picture;I like pictures.
I like to think in images, so I see each bit as an LED. It makes sense, an LED has two-states ON/OFF; a bit has two states 0 or 1. So, a byte for me is 8 LEDs numbered 0-7.
/>
The above image could represent the following code:
DDRB=0B00000001;
The Atmel chips have different ports, which usually have an array of pins. So, the DDR stands for digital direction registry of port B. Then, we assign a state to every pin on port B (PB0-PB7) by setting a bit to either 0 or 1. So, according to the image and our code, we are setting ports B1-7 as INPUTS (0 = INPUT) and PB0 as an OUTPUT.
But don't be confused, the LED we have connected isn't turned on yet. The voltage on PB0 still equals 0. But, we could now change the voltage from 0 to 5. We do this by changing another registry. The port state registry, PORTB.
PORTB=0B00000001;
Actually sets pin 0 (PB0) on port B to 5 volts. The other pins are still set as inputs, so you can't change the voltage.
That simple folks? Well, we also have to insert a delay. Delay's are really just telling the uC how many cycles to do nothing. There is some math involved that divides the clock speed to get the exact time delay you would like in finite-ish numbers. This math is locked away as a function in the
file. So, for our sake, it is a simple matter of adding:
_delay_ms(500);
This tells our Tiny to sit idle for half a second, then continue. Also, there is a _delay_us() function that will delay microseconds.
Ok. Here are my study-notes
Note #1: Adjusting the Clock Fuse.
I did have one modification I had to make to NH's program. He uploads his program using AVRDude. Atmel Studio actually has libraries to specific to the Tiny1634, these are included when you setup your project. One of these libraries require you tell the program how fast the CPU is going to be running. The ATtiny's have an internal 8mhz oscillator, but there is a
Atmel fuse
that is burned at the factory to divide 8mhz by 8, giving you a run speed of 1mhz. I wanted to be working with my 1634 at the full 8mhz.
So, I went to
Tools--->Device Programming
. You then have to select your "Tool," for me the AVR ISP MKII; your device, ATtiny1634 for me; interface, ISP. Then click "Apply." Now, under "Device Signature" click "Read." This should bring up the Device Programmer window. Now, make sure you have your programmer wired to your chip correctly and you have a stable connection (might throw a .1uF radial capacitor between VCC and GND on the Tiny1634). Click on the "Fuses" tab.
/>
Uncheck the "CKDIV8." It is the fuse that does exactly what it says, divides the clock by 8, reducing the chip from 8mhz to 1mhz.
Don't change any other fuses at this time.
Hit the "Program" button. This will set the fuse. If all goes well we didn't brick your chip.
While we are under the device programming window, click on the "Memories" tab. This is where you will actually upload your compiled program onto the chip. Here, if you click on the ellipsis you can select the code you would like to upload. This ends in ".elf" (unless you are using a chip besides an Tiny, then it'll end in .troll, hehe). So, select your code and then hit "Program."
/>
Now, Atmel Studio is setup to automatically program your code using the last selected devices whenever you hit "F5." Sadly, I found this rarely worked properly. But I'm betting it's because I have no decoupling capacitor--yes, I confirmed this.
I put a 1uF radial capacitor between VCC and GND, now the "F5" programming works as expected. I've no idea. Seems to work if I manually program it though. Shrug.
Ok. Now we have our Tiny running at 8mhz, we will need to adjust this in our code.
#define F_CPU 8000000 // AVR clock frequency in Hz, used by util/delay.h</pre>
Here we are telling the program our chip is running at 8mhz (8,000,000
hertz
).
After this, I uploaded the code and it ran just as I had hoped. The LED would be on for half a second, then off for half a second.
I will not go into much detail on Bitwise Operators because Newbie Hacks does an excellent job explaining them. And they are all over the internet. But for our purposes, building robots, it is good to know what they look like and what they'll do to our bits (remember, your pins' output are controlled by bit registries).
So, I'll cover two that apply to our example and one bitwise helper:
OR,
XOR,
and
<<
(left shift).
The OR operator:
We learned that the following sets pin PB0 as an OUTPUT.
DDRB=0b00000001;
But we can use the bitwise operator, OR, to do the same,
DDRB|=0b00000001;
The "|=" is an abbreviated operation that represents the following,
DDRB=DDRB|0b0000001;
In English, "Whatever is in DDRB is equal to whatever is in DDRB
OR
0b0000001."
That looks like this,
/>
Bitwise operators, like OR'ing, are done on the entire byte. That is, each bit, 0-7, are OR'd, so you have to keep in mind the operation isn't done
only
on the bit you want to change. This is where truth tables come in. Below is a table describing the output of the OR operation.
In electronics registers usually have a fixed width. For example, the PORTB registry has the width of 8 bits (0-7). The left-shift operator (<<) allows you to address a specific bit in a registry, it does this by moving the bits in the registry to the left. The registry itself stays at a fixed width, so when this happens the new places introduced are zero. The bits that get shifted past the width of the registry get detroyed. Going back to the PORTB registry, you could address a different pin besides PB0 by using a shift-left operator. The left-shift operator allows us to quickly create a bit-mask from a byte. In code, this looks like the following:
PORTB=DDRB|1<<3;
The above takes the binary number assigned in DDRB and OR's it with a bit mask that is exactly the same, except the third pin, that pin is equal to 1. Therefore,
PORTB
would look like this after the operation,
/>
This seems more complex to me, but I understand it becomes very important when you start pulling apart the metal of an AVR.
One last thing, the
contains defined pin constants. So, this operation,
DDRB|=0b00000001;
Can be written like so,
DDRB|=1<<PINB0;
They do exactly the same thing--and
I guess
the latter is easier to read. Pfft.
The XOR Operator:
The XOR (^) operator is much like the OR operation. Except, if A and B are equal the result is 0. They are not equal, the result is 1. Here's the XOR truth table.
XOR (^)
/>
Going back to the LED example, here is the XOR operation.
/>
We use the XOR operation to turn the LED off and on. Since a XOR operation on a bit is basically going to set it to the opposite it is in. Therefore, if it is 0 it becomes 1, if it is 1, it becomes 0. This means we can actually shorten or blink code using the operation.
So, our simplified code for Blinkin LED is,
#define F_CPU 8000000 // AVR clock frequency in Hz, used by util/delay.h#include<avr/io.h>#include<util/delay.h>intmain(void){DDRB=0b00000001;while(1){PORTB=0b00000001;_delay_ms(500);PORTB=0b00000000;_delay_ms(500);}}
And that's it. That is as far as I've gotten. Now, before I move forward I plan attempting to interface a
SN754410
and two small motors. I figure, we know how to perform digital pin control and this should allow use to control motor direction, even if we can't yet control the speed.
Robot Application Note #1:
SN754410 and ATtiny1634
First thing to do is wire up the H-Bridge.
/>
You may notice we wired both "EN" pins to 5v, I don't know how to generate PWM with AVR yet (but I hope to get there, so I'll revisit this). Also, I used 5v as both my motor source and the Tiny1634 source. The motors I used were
these little guys
. I figured since the drop voltage of the SN754410 is around 1.4-2v then I'd be pretty close to the target voltage of my motors (5v - 1.4v = 3.6v). I kept everything approximate to the Tiny's voltage rating; I figured if I wired something wrong I'd be safer keeping the voltage sources low.
And good call, this is the wiring mess I ended up with...I thought I would start with one motor and move to two.
/>
I began thinking code. I know the basics of the SN754410 and I wanted to be able to hit all the functions of its truth-table.
/>
So, I figured all I needed to do was get two of my IO pins to go HIGH and LOW to turn one direction, then switch them to go opposite. This reminded me of the XOR (^) operator, since it did exactly that, turn a bit to its opposite. This is the same operator we used to blink the LED. I ended up with the following code:
#define F_CPU 8000000 // AVR clock frequency in Hz, used by util/delay.h#include<avr/io.h>#include<util/delay.h>intx;intmain(void){DDRB|=1<<PINB0;//We set the LED pin to output.DDRA|=1<<PINA1;//Setup motor A IO 1DDRA|=1<<PINA2;//Setup motor A IO 2PORTA|=1<<PINA1;//Set motor A IO 1 high. Motor A IO 2 will default low.while(1){// "^=" changes the state of the bit to the opposite of its current.PORTB^=1<<PINB0;//LED ON/OFF.PORTA^=1<<PINA1;//Motor A starts HIGH, this flips it low, or back again.PORTA^=1<<PINA2;//Motor A starts LOW, this flips it high, or back again._delay_ms(500);}}
This code moved my motor one direction, then the other. But there was no pause between the changes of directions. I pulled it a part pretty quick, since I've generally had bad luck with instantaneous reversal of inductors.
Well, that wouldn't do. But I realized another problem. The XOR operator would flip the the pins from high to low, and back again. But how would I set
both
pins to low? Or both to high? Now, in Arduino C it's pretty easy, you just write digitalWrite(pin#, HIGH), but in AVR we are controlling bits.
I know I could accomplish this in long-hand, like so:
#define F_CPU 8000000 // AVR clock frequency in Hz, used by util/delay.h#include<avr/io.h>#include<util/delay.h>intmain(void){DDRB|=1<<PINB0;//We set the LED pin to output.DDRA|=1<<PINA1;//Setup motor A IO 1DDRA|=1<<PINA2;//Setup motor A IO 2while(1){//This will set the pins high or low, but it does not maintain other pin states.PORTB^=1<<PINB0;//LED ON/OFF.PORTA=0b00000010;//This sets PINA1 HIGH, and PINA2 LOW._delay_ms(1500);//Wait 1.5 seconds.PORTB^=1<<PINB0;//LED ON/OFF.PORTA=0b00000000;//This sets PINA1 LOW, and PINA2 LOW._delay_ms(1500);//Wait 1.5 seconds.PORTB^=1<<PINB0;//LED ON/OFF.PORTA=0b00000100;//This sets PINA1 HIGH, and PINA2 LOW._delay_ms(1500);//Wait 1.5 seconds.PORTB^=1<<PINB0;//LED ON/OFF.PORTA=0b00000000;//This sets PINA1 HIGH, and PINA2 LOW._delay_ms(1500);//Wait 1.5 seconds.}}
This gave me the output I wanted. The motor would turn one direction for 1.5 seconds, then stop, turn the other way, then stop, and start over. Like this:
This code felt bloated to me. And another problem was dawning: What if my LED was on PORTA? That means I would need to keep track the state of three bits (1) bit controlling motor connection A, (2) bit controlling motor connection B, and (3) LED. This means I would need to track 9 possible states (3 pins ^ 2 states = 9 pin states). Now, I might be able to do this mentally, but it would be taxing, especially if my code is dynamically modifying the PORTA registry. But what if all 8 pins were used? 8 pins ^ 2 sates = 64 pin states. Ummm...no. I can't do it.
It hit me. This is why bitmasks and bitwise operators are so important;
they dynamically change the states of one bit, while preserving the states of the rest of the registry.
Nifty.
I spent some time with in Newbie Hack's tutorial:
MCU LED Blink
tutorial. Specifically,
the video there
. In it he explains how to use bitwise operators and bit-masks to change the state of a pin while preserving all of the other pin states.
Now we're cooking.
We already know the bitwise operator (and mask) to set one bit high:
OR.
The
OR (|)
operator sets the a pin HIGH:
/>
Sadly, clearing a bit while preserving the registry is
slightly
more complicated. To clear a bit we still use a bitmask, but we use two operators:
AND (&)
and
NOT (~)
. Their truth-tables look like the following:
AND (&)
/>
NOT (~)
is unlike the other operators, it's simple. It inverts the bit. If 0, it becomes 1, if 1, it turns to 0.
/>
Instead of immediately modifying the PORT state we actually modify our bitmask with the NOT operator. This gives us the inverse mask (00000001 becomes 11111110). We then AND (&) the inverted mask with hte PORT's original state to clear PIN0 while preserving the other bit's state. Here's the LED example for
NOT
and
AND
operation to clear a bit:
/>
Ok. I
could
wrap my head around this. I developed the following code which did what I wanted:
#define F_CPU 8000000 // AVR clock frequency in Hz, used by util/delay.h#include<avr/io.h>#include<util/delay.h>intmain(void){DDRB|=1<<PINB0;//We set the LED pin to output.DDRA|=1<<PINA1;//Setup motor A IO 1DDRA|=1<<PINA2;//Setup motor A IO 2while(1){//Sets motor input A LOW, B HIGH.PORTB^=1<<PINB0;//LED ON/OFF.PORTA|=1<<PINA1;//This sets PINA1 HIGH.PORTA&=~(1<<PINA2);//This sets PINA2 LOW._delay_ms(1500);//Wait 1.5 seconds.//Sets both motor inputs to low.PORTB^=1<<PINB0;//LED ON/OFF.PORTA&=~(1<<PINA1);//This sets PINA1 LOW.PORTA&=~(1<<PINA2);//This sets PINA2 LOW._delay_ms(1500);//Wait 1.5 seconds.//Sets motor input A HIGH, B LOW.PORTB^=1<<PINB0;//LED ON/OFF.PORTA&=~(1<<PINA1);//This sets PINA1 LOW.PORTA|=1<<PINA2;//This sets PINA2 HIGH._delay_ms(1500);//Wait 1.5 seconds.//Sets both motor inputs to low.PORTB^=1<<PINB0;//LED ON/OFF.PORTA&=~(1<<PINA1);//This sets PINA1 LOW.PORTA&=~(1<<PINA2);//This sets PINA2 LOW._delay_ms(1500);//Wait 1.5 seconds.}}
Code to NOT a PIN looks like this
PORTA &= ~ (1 << PINA1);.
In plain English and in order of operation, "Set PORTA PIN1 to HIGH, create a bitmask of PORTA, then NOT that bitmask. After, take the NOT'ed bitmask and AND it with PORTA's original state."
Whew.
I'm not sure I follow that even after writing it. But I understand it. Really,
PORTA &= ~ (1 << PINA1) = Set PA1 LOW.
But this is good. We now can dynamically change the state of one PIN without destroying the state of the other PINs on the same port. Booyah!
Alright, let's go for broke; now that I understand how to set pins HIGH or LOW, I wanted an easy way to control a motor with AVR. I wrote five functions. Four control the states of the motor (HH, LL, LH, HL) and one is a delay function that will accept a variable. The functions can be called from the main loop. Each one expects three parameters, two pin numbers and the number of milliseconds you wish the function to run.
#define F_CPU 8000000 // AVR clock frequency in Hz, used by util/delay.h#include<avr/io.h>#include<util/delay.h>voiddelay_ms(intms){//We make our own millisecond delay function because//the _delay_ms does not like dynamic variables. Meaning//you cannot pass it a variable. By making our own, we can.while(ms--){_delay_us(1000);// one millisecond}}intforward(intmotPinA,intmotPinB,intmotorFireDuration){//Sets motor input A LOW, B HIGH.PORTB^=1<<PINB0;//LED ON/OFF.PORTA|=1<<motPinA;//This sets PINA1 HIGH.PORTA&=~(1<<motPinB);//This sets PINA2 LOW.delay_ms(motorFireDuration);//Wait 1.5 seconds.}intbackward(intmotPinA,intmotPinB,intmotorFireDuration){//Sets motor input A HIGH, B LOW.PORTB^=1<<PINB0;//LED ON/OFF.PORTA&=~(1<<motPinA);//This sets PINA1 LOW.PORTA|=1<<motPinB;//This sets PINA2 HIGH.delay_ms(motorFireDuration);//Wait 1.5 seconds.}intcoast(intmotPinA,intmotPinB,intmotorFireDuration){//Sets both motor inputs to low.PORTB^=1<<PINB0;//LED ON/OFF.PORTA&=~(1<<motPinA);//This sets PINA1 LOW.PORTA&=~(1<<motPinB);//This sets PINA2 LOW.delay_ms(motorFireDuration);//Wait 1.5 seconds.}intbrake(intmotPinA,intmotPinB,intmotorFireDuration){//Sets both motor inputs to HIGH.PORTB^=1<<PINB0;//LED ON/OFF.PORTA|=1<<motPinA;//This sets PINA1 HIGH.PORTA|=1<<motPinB;//This sets PINA2 HIGH.delay_ms(motorFireDuration);//Wait 1.5 seconds.}intmain(){DDRB|=1<<PINB0;//We set the LED pin to output.DDRA|=1<<PINA1;//Setup motor A IO 1DDRA|=1<<PINA2;//Setup motor A IO 2while(1){//This function spins the motor in one direction for X milliseconds. (L, H)forward(PINA1,PINA2,750);//This function lets the motor free spin for X milliseconds (L, L).coast(PINA1,PINA2,1500);//This function spins the motor in the other direction for X milliseconds. (H, L)backward(PINA1,PINA2,800);//This function brakes the motor for X milliseconds (H, H).brake(PINA1,PINA2,500);}}
Nifty, eh? Now all we need to do is add a second motor and then we can pass the functions the second motor pins and we can use the same set of code to control both motors. Aren't we efficient!
Some time later...
Well, that didn't not work as I wanted. I'm tired and didn't think through how the delay would work in the function. The function would be called for motor A, but motor B wouldn't be called until A was done. Doh.
Yes, this could be rewritten a hundred ways to salvage it. But! Right now I'm tired, so here's our working code.
#define F_CPU 8000000 // AVR clock frequency in Hz, used by util/delay.h#include<avr/io.h>#include<util/delay.h>voiddelay_ms(intms){//We make our own millisecond delay function because//the _delay_ms does not like dynamic variables. Meaning//you cannot pass it a variable. By making our own, we can.while(ms--){_delay_us(1000);// one millisecond}}intforward(intmotPinA,intmotPinB){//Sets motor input A LOW, B HIGH.PORTA|=1<<motPinA;//This sets PINA1 HIGH.PORTA&=~(1<<motPinB);//This sets PINA2 LOW.}intbackward(intmotPinA,intmotPinB){//Sets motor input A HIGH, B LOW.PORTB^=1<<PINB0;//LED ON/OFF.PORTA&=~(1<<motPinA);//This sets PINA1 LOW.PORTA|=1<<motPinB;//This sets PINA2 HIGH.}intcoast(intmotPinA,intmotPinB){PORTA&=~(1<<motPinA);//This sets PINA1 LOW.PORTA&=~(1<<motPinB);//This sets PINA2 LOW.}intbrake(intmotPinA,intmotPinB){//Sets both motor inputs to HIGH.PORTA|=1<<motPinA;//This sets PINA1 HIGH.PORTA|=1<<motPinB;//This sets PINA2 HIGH.}intmain(){DDRB|=1<<PINB0;//We set the LED pin to output.DDRA|=1<<PINA1;//Setup motor A IO 1DDRA|=1<<PINA2;//Setup motor A IO 2DDRA|=1<<PINB3;//Setup motor A IO 1DDRA|=1<<PINC4;//Setup motor A IO 1while(1){//This function spins the motor in one direction for X milliseconds. (L, H)forward(PINA1,PINA2);forward(PINA4,PINA3);delay_ms(1000);//This function lets the motor free spin for X milliseconds (L, L).coast(PINA1,PINA2);coast(PINA4,PINA3);delay_ms(1000);//This function spins the motor in the other direction for X milliseconds. (H, L)backward(PINA1,PINA2);backward(PINA4,PINA3);delay_ms(1000);//This function brakes the motor for X milliseconds (H, H).brake(PINA1,PINA2);brake(PINA4,PINA3);delay_ms(1000);}}
Something else I realized. I couldn't wire motors to a different PORT (my schematic shows PB3 and PC0) since my functions call upon PORTA specifically. Eh, oh well. I'm tired. I'm sure I'll clean this up over the next few days.








































































































{kind=link}
{kind=link}
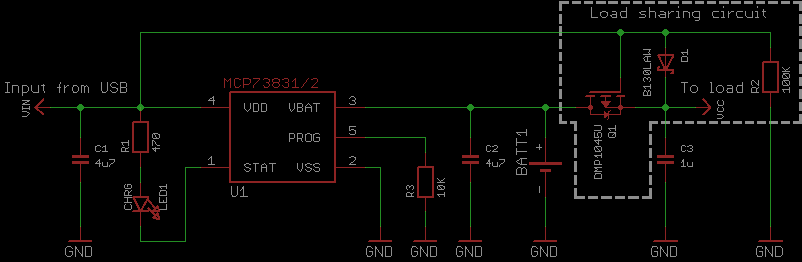{kind=link}